发布时间:2020-08-04所属分类:科技论文浏览:1次
摘 要: 摘 要:我国是一个水资源短缺的国家,随着社会经济,工业水平的飞速发展,水污染现象也日益严重,严重影响了人们的生活环境与社会的可持续发展,对水质进行有效的监测已刻不容缓,但目前在水质环境监测工作方面存在诸多难点,例如人力资源不足和经费短缺等问
摘 要:我国是一个水资源短缺的国家,随着社会经济,工业水平的飞速发展,水污染现象也日益严重,严重影响了人们的生活环境与社会的可持续发展,对水质进行有效的监测已刻不容缓,但目前在水质环境监测工作方面存在诸多难点,例如人力资源不足和经费短缺等问题,利用基于机器视觉的无人机水质监测系统可提高水质监测效率,保障水质监测效果。
关键词:水质监测;无人机;计算机视觉
序论
随着我国经济的发展,社会生产力的进步,同时也带来了环境方面的问题,水污染就是其一,我国的淡水资源较为稀缺,由于水污染问题,在工业发达、人口众多、降雨量少的华北地区,水资源匮乏已非常严重,严重影响了人们的日常生活以及当地的经济发展,对水环境实施有效的监测与治理已刻不容缓。但监测过程中存在诸多难点。
传统的水质检测方法采用定点采样,对水样进行物理和化学的分析,获取水质状况,这种监测方法须大量在各个水域中布置采集点才能够获取水质信息,效率低,且在地势陡峭地区不便采样,对工作人员压力较大,对大范围的水域进行监测时,传统方法采集工作量大,成本高,研究周期长。目前,我国在基层环境监测站的监测人员数量不够多,经费不足,工作条件相对艰苦,风险大,人力资源流失,难以对水质环境进行有效监测。
目前,有用遥感技术对水污染进行监测的方案,利用热红外遥感技术、可见光和反射红外遥感技术以及微波遥感技术来实现对远距离物体的识别、测量,对物体的本质进行分析,从而达到监测效果,但无人机需搭载较多传感器,热红外传感器,微波传感器等,成本高,基层环境监测站难以普及。
为此,我们提出了基于机器视觉的无人机水质监测方案,该系统由搭载高清摄像头的无人机,地面站与数据处理中心构成,省去大量传感器,很大程度上降低了监测成本,便于基层环境监测站的普及,提高监测效率,保障对水质环境的有效监测。
一、概述
不同的水质条件,水体呈现不同颜色,例如,水体富营养化会造成藻类等生物大量繁殖导致水面变色,根据占优势的浮游藻类的颜色,水面往往呈现褐红色、棕色、蓝色等,水体油污染中,油会在水面形成油膜,呈现出黑色,在本案例中,通过提取水质图像的颜色特征,判断水质污染情况。
有投稿机器人方向论文的作者,可以查看:自动化机器人类论文发表指导
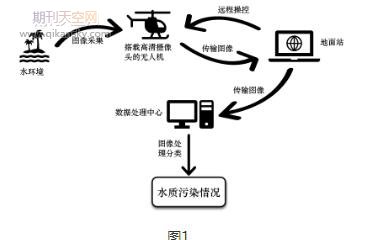
该系统由无人机平台,地面站,数据处理中心组成。无人机搭载高清摄像头,对水质进行图像采集,利用WIFI传输模块传输采集到的水质图像,地面站对无人机进行远程遥控以及接收处理无人机传输来的水质图像,数据处理中心根据采集到的图像利用计算机视觉技术进行分析,实现对水源污染情况的监测。如图1所示
数据处理通过采集大量的水环境图像,由水污染方面的专家对图像进行分类,获取训练样本,通过卷积神经网络,根据数据样本对模型进行训练,获取训练完成的模型,由地面站传来的图像经过预处理后,输入该模型,进行预测,得到水质评价结果。如图2所示
二、图像采集
无人机选用Phantom4Advanced型号无人机,其搭载1英寸2千万像素影像传感器的相机,可拍摄4K/60fps视频,并以14张/秒的速度拍摄静态照片,图像传输与控制距离达到7公里,保障水源图像采集任务的作业半径。
地面站由lightbridge图像传输系统和笔记本电脑构成,实现图像实时传输,提高图像分析效率。
三、数据获取及预处理
通过网上获取水质图像与实地采集相结合,获取污染水图像信息样本,由水污染专家对水质图像进行分类,给不同的水质图像赋予相应污染类型标签,建立水质图像与其污染情况的对应关系样本库,选取其中的80%用来作为训练集,20%用来作为测试集,用序号表示各个水污染种类,1为水体富营养化2为水面垃圾漂浮物,3为水体油污染。
四、构建卷积神经网络
本方案采用Keras工具构建LeNet5模型,该模型由七层构成,第一层为卷积层,该层用于进行特征提取,设置卷积核个数为20,卷积核为5*5的矩阵,采用填充模式为same,保留边界处卷积结果,使卷积后的结果和原图像大小相同,第二层为池化层,用来压缩数据,降低数据维度,设置选择框的大小为2*2,并且两个方向上的步长都为2,图片经过采样后,变为原来四分之一,第三层为卷积层,该层的每一个特征平面对应多个池化层的采样数据,与第一层相同,第四层为池化层,用于压缩数据,与第二层设置相同,第五层为扁平层,用于将多维输入转化成一维输出,第六层为全连接层,设置输出维度为500,第七层为全连接层,输出的分类个数设置为10,采用softmax作为激活函数。
五、训练模型
训练模型前,需对图像预处理,先读入待训练的水污染图像集,将图片进行归一化处理,图片归一化尺寸为64,将原始像素强度缩放到[0,1]的范围内,该操作通过一系列变换,将待处理的原始图像转换成相应的唯一标准形、标签向量化,使图像可以抵抗几何变换的攻击,然后需读取图像标签,将标签向量化。使用ImageDataGenerator数据增广技术来对数据集进行数据增强,对数据集图像进行随机移动、旋转、剪切、翻转、改变图像尺寸、增加图像噪声等操作,用来丰富图像训练集,加强模型的泛化能力。
六、测试结果
根据准备好的训练集,对图像进行预处理,预处理完成后开始训练,设置epoches为200,Batchsize为32,训练集损失值、测试集损失值、如图3-1所示。
经过200轮训练,训练集及测试集损失值降到0.1左右。训练集准确率以及测试集准确率如图3-2所示,经过200轮训练后,训练集和测试集的准确率都已接近于1。
图3-1 图3-2
利用高清摄像机实地采集图像,编写预测程序,读取预先训练好的模型,将采集到的图像输入程序,程序对图像进行处理,根据模型得到预测结果,输出结果为预测出的水污染情况,为方便处理,用编号表示水污染情况。
1水体富营养化,2水面垃圾漂浮,3水体油污染,预测准确率90%左右,能够相对准确地预测出水环境污染状况。
结论
基于机器视觉的无人机水质监测系统具有很高的实用价值,其采集效率高,适应性强,识别准确率高,使用成本低,合理地运用该技术能够提高水质监测人员的工作效率,可以在人力资源和经费不足的情况下实现对水质的有效监测,以保障良好的水环境。——论文作者:周宇泽 王茜
SCISSCIAHCI