0
发表咨询在线!

发布时间:2022-01-04所属分类:电工职称论文浏览:1616次
摘 要: 摘要:300 MVar 快速动态响应同步调相机广泛应用于特高压直流输电。为准确辨识调相机器模型参数,提出一种基于交替迭代优化的电气参数分步联合辨识方法。采用考虑饱和特性的六阶实用电机模型,设计了包含励磁阶跃扰动、甩负荷扰动和机端电压扰动的小扰动实验方案;基于

摘要:300 MVar 快速动态响应同步调相机广泛应用于特高压直流输电。为准确辨识调相机器模型参数,提出一种基于交替迭代优化的电气参数分步联合辨识方法。采用考虑饱和特性的六阶实用电机模型,设计了包含励磁阶跃扰动、甩负荷扰动和机端电压扰动的小扰动实验方案;基于交替迭代方向乘子法和轨迹灵敏度分析法,制定了采用三组小扰动实验数据联合辨识、稳态参数和暂态参数分步辨识的策略,并将其应用到伊克昭 -沂南直流送电工程中。研究表明,三组实验联合辨识优于单扰动辨识,分步辨识优于一次性辨识所有参数,很好地解决了基于单次扰动实验辨识出的参数无法复现其他工况实验数据的问题,提高了参数辨识结果的适用性和准确性。
关键词:同步调相机;分步联合辨识;交替方向乘子法;轨迹灵敏度
0 引 言
随着特高压直流输电技术的大规模应用,交直流混合电网“强直弱交”的问题日益凸显,必须配备大量动态无功补偿装置[1-3。而] 300 MVar 大容量新型快速动态响应同步调相机的电气参数经过优化设计,在动态无功补偿方面具有明显优势[4]。同步调相机结构与同步电机相似,其暂态过程主要由其电气参数决定,但厂家提供的模型和参数往往与其实际动态特性存在差异[5],尤其是在大扰动时的动/暂态特性和非线性饱和特性。因此获得准确的同步调相机模型及电气参数是交直流混合电力系统分析、运行和控制的基础。
目前,国内外学者提出了多种辨识同步电机参数的算法[6-11],但实用化效果并不理想。同步电机待辨识参数多,同时辨识所有参数难度较大,易出现多值性和收敛性问题。若考虑同步电机的非线性饱和特性将进一步加剧多值性问题。
为此,有学者提出依据灵敏度大小逐步辨识参数。文献[12]提出利用灵敏度辨识大小筛选出对电力系统动态过程影响较大的主导参数作为待估计参数集,以降低待辨识参数数量;文献[13]进一步提出可以根据灵敏度的相位判断参数的可辨识性;文献[14] 在灵敏度分析的基础上,提出通过网格初始化搜索算法解决初值设置不合理导致的参数辨识多值性问题;文献[15]通过分析不同扰动下同步发电机参数的灵敏度特征,制定了发电机参数分步辨识策略,提高瞬态/超瞬态参数辨识的准确性;文献[16]利用短路实验引起扰动,基于灵敏度分析确定主导参数进行分布辨识;文献[17]利用甩负荷实验,基于轨迹灵敏度确定合适的加权区间和权重系数,但没有考虑饱和效应;文献[18]利用励磁阶跃扰动,在频域内采用分步辨识策略辨识发电机参数,也没有考虑饱和效应。以上文献均从理论角度阐述了基于灵敏度特征辨识同步电机参数的可行性,但存在以下问题:大部分文献推荐采用短路大扰动实验以提高参数辨识精度,但调相机位于换流站,难以开展此类大扰动实验,有必要探究基于小扰动的参数辨识方法;不同扰动类型下的同步电机工况不同,基于单次扰动实验数据辨识出的参数往往难以适用于其他扰动工况;相当一部分文献没有考虑同步电机饱和特性,而饱和特性恰恰是影响调相机动态、暂态/次暂态等性能的关键因素之一。
进一步分析,同步电机参数之间相互耦合,部分参数作用效果相反[9]。若同时辨识作用效果相反的参数,即使参数灵敏度大,也可能导致待辨识参数无法收敛至最优值。为此,可以将参数辨识看作优化问题,依据作用效果将待辨识参数分成几组分步求解。而交替迭代乘子法(ADMM)作为一种求解此类优化问题的分散式方法,具有良好的收敛性、鲁棒性,在电力系统经济调度、微电网群调度等方面取得了良好的应用效果[19-20]。
针对以上问题,设计了适用于同步调相机的小扰动实验方案。基于参数灵敏度分析法和 ADMM 法,采用三组小扰动实验数据联合辨识、稳态参数和暂态参数分步辨识的策略,完成现场实测验证。
1 同步调相机模型及坐标变换
1.1 同步调相机数学模型
同步调相机内部结构及工作原理均与同步发电机类似,主要区别在于同步调相机没有原动力。
1.2 数据预处理
数据预处理分为:数据滤波、计算有效值、标幺化、dq 坐标变换。数据滤波通过高通滤波滤除功角、电压、电流等测量数据中的高频噪声,减小对辨识效果的影响;dq 坐标变换若按照通用的 dq0 坐标变换方法,需要知道调相机启动瞬间转子直轴与 a 相轴线初始角度 a0或者功率因数角 φ,但是初始角度 a0往往不易准确测量,功角曲线的测量受转速脉冲精度的影响会有相当的误差[21]。
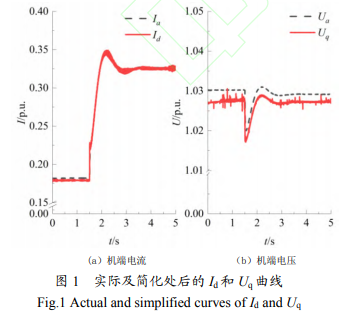
针对同步调相机几乎不发有功的特点,在功率因数角 φ 足够小的情况下,考虑利用同步调相机定子侧电压 Ua和线电流 Ia 的有效值代替 Id 和 Uq,在对辨识结果影响不大的前提下,进一步简化计算。
基于 Simulink 仿真调相机机端电压扰动工况,仿真发现同步调相机的功角小于 4°,实际及简化处理得到的 Id和 Uq 曲线基本重合,如图 1 所示。基于以上两组数据分别进行辨识调相机参数,辨识结果在误差上基本没有区别,进一步验证了这种数据处理的可行性。下文均采用这种数据处理方式。
2 同步调相机参数轨迹灵敏度分析
文献[9]直接使用 Simulink 中的同步电机模块进行灵敏度分析,所用模型与 PSASP 中的电机模型不兼容,而其所使用的辨识模型又与灵敏度分析所用模型不同,这导致了辨识过程中对参数的调整方向与灵敏度分析的规律存在区别,所制定的辨识策略在实际应用中出现收敛效率低、易陷入局部最优的问题。同时,同步调相机与传统同步电机在参数范围、扰动模式上(例如甩负荷扰动)均有较大区别,有必要依据辨识所用模型重新计算参数灵敏度。
(1)励磁阶跃扰动:维持同步调相机无功出力不变,改变励磁调节器给定值,在励磁回路中施加一个使机端电压波动大于 2%的扰动量;
(2)机端电压扰动:由于同步调相机通过升压变压器直接连接在换流站交流母线上,紧靠换流阀,进行短路等大扰动实验的安全风险大,故采用投切电容器的方式造成机端电压扰动。维持同步调相机无功出力不变,在机端依次投切 255 MVar、210 MVar、210 MVar 三组电容器组,施加一个使机端电压波动大于 2%的扰动量;
(3)甩负荷扰动实验:令同步调相机进相-150 MVar 运行,突然切机甩负荷产生扰动。
4.2 参数辨识验证
选取 50 MVar+3%励磁阶跃、投一组 210 MVar 电容器组、-150 MVar 甩负荷三组扰动实验数据,依据图 5 所示辨识流程依次辨识同步调相机参数。
(1)获得辨识起点;
预辨识结果见表 1 和图 7。
3 可以看出,拟合曲线与实测曲线十分接近,说明所提的分步联合辨识策略效果良好。
4.3 多种参数辨识策略比较
为了说明上述同步调相机参数分步联合辨识策略的有效性,分别利用厂家提供的参数设计值、分步联合辨识策略辨识出的参数、单次扰动辨识出的参数、利用三组扰动数据一次性辨识出的参数拟合实测数据,计算拟合曲线与实测曲线的均方根误差。结果见表 3。
分析表 3 可知,采用单次扰动辨识出的参数不能保证对其他两类扰动的拟合效果(2 组、3 组、4 组);利用三种扰动数据一次辨识出所有参数的效果略有所改善(5 组),但有提升空间;采用分布联合辨识策略辨识出的参数能准确复现所有扰动实测结果,获得比设计值和单扰动辨识方法、单次联合辨识方法更好的效果;分步联合辨识策略由于兼顾了甩负荷、励磁阶跃和机端电压扰动的动态特性,所得结果具有更小的综合误差,其结果具有更好的适用性。
5 结束语
提出了一种适用于同步调相机的电气参数辨识方法,所做的工作主要有:
(1)建立了考虑饱和特性的同步调相机数学模型。通过高通滤波对数据进行预处理,针对调相机不发有功功率的特点,确定了利用 Ua和 Ia代替 Id 和 Uq的数据简化处理方式;
(2)针对换流站实际运行工况,设计了适用于现场操作的同步调相机小扰动实验方案;
(3)通过参数轨迹灵敏度,分析确定辨识参数的最佳扰动组合。将 ADMM 的思想引入参数辨识中,提出了实用化的调相机参数分步联合辨识方法,并将其成功地应用到伊克昭-沂南直流送电工程中。
研究表明,三组实验联合辨识优于单扰动辨识,分步辨识优于一次性辨识所有参数。其很好地解决了基于单次扰动实验辨识出的参数无法复现其他工况实验数据的问题,提高了参数辨识结果的适用性和准确性。——论文作者:王继豪 1,王安东 1,孙福春 1,郑竞宏 2,曹志伟 1,朱文兵 1
参 考 文 献
[1] 张红丽, 刘福锁, 李威. 动态无功补偿装置提高多馈入直流恢复的布点方法[J]. 电力系统自动化, 2016, 40(5): 133-138. Zhang Hongli, Liu Fusuo, Li Wei. Site selection for dynamic reactive power compensation and improvement of recovery from commutation failures in multi-infeed HDV system[J]. Automation of Electric Power System. 2016(05): 133-138.
[2] 刘振亚, 张启平, 王雅婷, 等. 提高西北新甘青 750kV 送端电网安全稳定水平的无功补偿措施研究[J]. 中国电机工程学报,2015, 35(5): 1015-1022. .Liu Zhenya, Zhang Qiping, Wang Yating, et al. Research on reactive compensation strategies for improving stability level of sending-end of 750kV grid in northwest china[J]. Proceedings of the CSEE, 2015, 35(5): 1015-1022.
[3] 尹立敏, 雷钢, 吕莉莉, 等. 基于同步调相机降低换相失败风险的仿真研究[J]. 电测与仪表, 2018 (15): 138-146. Yin Limin, Lei Gang, Lv Lili, et al. Simulation research on reducing the commutation failure based on synchronous condenser[J]. Electrical Measurement & Instrumentation, 2018(15): 138-146.
[4] 李志强,蒋维勇,王彦滨,等. 大容量新型调相机关键技术参数及其优化设计[J]. 大电机技术. 2017(4): 15-22. Li Zhiqiang, Jiang Weiyong, Wang Yanbin, et al. Key Technical Parameters and Optimal Design of New Types of Large Capacity Synchronous Condenser[J]. Large Electric Machine and Hydraulic Turbine. 2017(4): 15-22.
[5] 刘柏私,甄威,唐永红. 同步发电机参数辨识方法综述[J]. 四川电力技术. 2007(2): 78-79. Liu Baisi, Zhen Wei, Tang Yonghong. Review of Synchronous Generator Parameter Identification Methods[J]. Sichuan Electric Power Technology. 2007(2): 78-79.
[6] 蔡然, 杨俊华, 杨梦丽, 等. 基于改进静止频率响应实验的同步电机参数辨识[J]. 电测与仪表, 2015, 52(7): 123-128. Cai Ran, Yang Junhua, Yang Mengli, et al. Parameter identification of the synchronous machine based on an improved standstill frequency test[J]. Electrical Measurement & Instrumentation, 2015, 52(7): 123-128.
[7] 宋珂, 戴鹏, 袁庆庆, 等. 基于静态频域法的电励磁同步电机参数辨识 [J]. 电测与仪表, 2012, 49(2): 32-36. Song Ke, Dai Peng, Yuan Qingqing, et al. Parameter estimation of synchronous machine based on standstill frequency response[J]. Electrical Measurement & Instrumentation, 2012, 49(2): 32-36.
[8] 司家荣, 蔡国伟, 孙正龙, 等. 基于下垂控制逆变器的虚拟发电机建模与特性研究[J]. 电测与仪表, 2017, 54(22): 116-122. Si Jiarong, Cai Guowei, Sun Zhenglong, et al. Modeling and virtual synchronous generator characteristics research based on droop-controlled inverters[J]. Electrical Measurement & Instrumentation, 2017, 54(22): 116-122.
濠㈠湱澧楀Σ锟�:闁冲墎濮甸弸鍐偖椤旇姤闄嶉柤濂変簽閻擄紕绱旈幋娆屽亾娴g儤妯婇柡鍜佸枔閳ь兛妞掔粩楣冨棘閸︻厾鎼兼俊顐熷亾缂佷究鍨洪弳鐔煎箲椤旇偐姘ㄩ柨娑樼焷椤曗晠寮版惔銏℃嫳闁哄倸娲ㄧ亸鐐差啅閼碱剛鐥呴柛娆愬灱閵嗗啰鎲存担绋跨亖闁挎稑鏈导鍐窗濠娾偓缂嶆棃鎳撻敓锟�.闁冲灈鈧剚娲ら柡瀣矋閸嬪秹寮伴娆戠▕闁兼澘鎳嶇粭鏍ㄧ▔瀹ュ棗鍘掗柡鍫墮闁解晠宕i弶璺ㄦ綌缂佲偓閻戞ɑ鐎柣姘煎枙娣囧﹪骞侀敓锟�,闁告瑯鍨垫禒鍫㈠寲閿燂拷閻庢冻闄勫﹢铏亜妤e啯锛�濞存粌鐗呮禍鎺楀礆閻樼粯鐝�.

SCISSCIAHCI

