发布时间:2022-01-07所属分类:电工职称论文浏览:1次
摘 要: 摘要 海底滑坡、浊流等深海底地质灾害严重威胁海洋工程安全,是国家深海开发亟待解决的风险问题。为避免深海海底地质灾害对海底工程造成危害,解决深海海底地质灾害监测预警的难题,我们研发了一套复杂深海工程地质原位长期监测系统。该系统通过声学、电阻率、超孔隙水
摘要 海底滑坡、浊流等深海底地质灾害严重威胁海洋工程安全,是国家深海开发亟待解决的风险问题。为避免深海海底地质灾害对海底工程造成危害,解决深海海底地质灾害监测预警的难题,我们研发了一套复杂深海工程地质原位长期监测系统。该系统通过声学、电阻率、超孔隙水压力等方法监测深海海底沉积物的物理力学性质变化,实现了对深海海底地质灾害的监测和预警。该系统主要包括海床基搭载平台、监测系统、通讯控制系统、供电系统等。其中监测系统主要通过原位长期监测海底沉积物的电阻率、声学、超孔隙水压力等的变化来获取海底沉积物的物理力学性质变化;通讯控制系统可以实现海底到海面,再到陆地的双向通讯和数据传输。其中供电系统通过独特设计的海水电池工艺,可以满足该系统在海底长期工作一年的电量需求。复杂深海工程地质原位长期监测系统已完成了近海测试,并搭载“海洋地质六号”、“东方红三号”、“张謇号”等科考船在南海进行了多次远海海试,获取了丰富的实测数据。电阻率监测系统采用温纳法滚动测量,测得的水土界面位置平均电阻率为 0.207 Ω·m。超孔隙水压力监测系统采用开放式结构的压差式光纤光栅孔压测量方法,监测到孔压观测的四个标志性阶段:1)贯入过程引起的超孔隙水压力累计,峰值为 34.942 kPa,历时 0.182 h;2)贯入完成后累积的超孔隙水压力衰减,衰减到 9.973 kPa,历时为 0.810 h;3)环境应力引起的超孔隙水压力实时响应,超孔隙水压力的变化范围为 8.327~14.384 kPa;4)残余孔隙水压力平均值为 11.150 kPa;声学监测系统采用两个一发三收模式,测量的海水平均声速为 1 533 m/s,测量的海底沉积物自上而下的平均声速依次为 1 586 m/s、1 587 m/s、1 784 m/s、1 735 m/s、1 831 m/s。复杂深海工程地质原位长期监测系统的成功研制将显著提升目前海洋工程地质原位长期观测的技术能力,解决复杂深海工程地质评价及地质灾害监测预警的技术难题。
关键词 海底地质灾害;物理力学性质;原位观测;声速;电阻率;超孔隙水压力
0 引言
随着陆地自然资源的枯竭,人类将目光转向自然资源更加丰富的深海。目前,沿海各国都加大了对深海工程和深海油气田的开发力度,而深海工程地质环境作为深海工程和深海油气田所处的基本地质环境,会影响海洋工程施工甚至会产生直接危害,特别当海底地质灾害发生时,深海工程地质环境会对深海工程建设和深海油气田开采造成巨大的威胁,严重制约了海洋资源的开发和利用,例如海底滑坡、海底沉降等地质灾害,会造成海底电缆断裂、引发海底油气钻井平台坍塌等海洋工程灾害[1],严重的甚至可能诱发海底地震,引发海啸,严重危害人类安全[2]。因此,要解决深海工程和深海油气田的安全开发利用问题,必须对深海工程地质环境进行原位长期监测。
目前基于深海环境原位长期监测的研究可以分为深海水体环境的原位长期监测和深海海底地质环境的原位长期监测。关于深海水体环境的监测有:美国地质调查局(USGS)研发了 Geoprobe,可以监测海水流向、流速、温度、盐度、深度、海水浊度、泥沙粒径、泥沙浓度等参数[3]。德国亥姆霍兹海洋研究中心(GEOMAR)研制的海底测量仪可以监测海底面的位移与高程变化[4]。关于深海工程地质环境的监测研究主要以海底工程建设(例如深海石油开采和水合物开采等)监测为主,例如 2013 年和 2017 年,日本进行海底天然气水合物试采时分别进行了监测井温度压力监测、海底沉降变形监测、海底甲烷泄漏监测等[5-8];2017 年,中国在南海神狐海域进行了首次海底天然气水合物试采,建立了大气层、海水层、海底面、海底面以下的“四位一体”环境监测系统[9-11]。目前而言,由于深海工程地质环境的监测难度较大,关于深海环境的研究主要以深海水体监测和深海工程建设近海底监测为主,关于深海工程地质环境的原位长期监测较少。我们团队凭借多学科融合的特点,在国家基金委重大仪器专项的资助下,开展了相关深海工程地质环境的原位长期监测。
依靠上述优势,我们研发的深海工程地质环境原位长期监测系统通过原位长期监测海底沉积物的电阻率、声学、超孔隙水压力等的变化来获取海底沉积物的物理力学性质变化,然后将测量结果通过水声通讯、卫星通讯传输到陆上实验室中,实现深海工程地质环境的监测。本文主要介绍了系统的组成与原理包括海床基监测平台、监测系统、通讯控制系统、供电系统,海试应用部分包括系统海试概况,海试数据处理等部分。
1 系统组成与工作原理
复杂深海工程地质原位长期监测系统主要由以下三部分组成:位于海底的海床基监测平台、位于海面的中继通讯浮标、位于陆地的实验室远程监控平台。该系统的工作原理为海底的海床基监测平台采集海底沉积物的电阻率、声学、超孔隙水压力等数据和水体环境数据,采集的数据通过水声通讯传输到水面的中继浮标,然后中继浮标通过卫星将数据传送到远程监控的实验室中(图 1)。
工作时,海水电池和蓄电池给整个系统供电,设备在控制系统的控制下,依次将电阻率探杆、声学探杆、超孔隙水压力探杆贯入到海底沉积物中,然后依次发送采集信号,采集海底沉积物的电阻率、声学、超孔隙水压力等数据,待数据采集完毕后,将处理好的数据通过声学通讯机发送给海面的中继浮标。
1.1 海床基搭载平台
海床基搭载平台结构上分为两层,采用框架式结构,其中上层为数据采集控制系统,下层为搭载平台和坐底贯入控制系统,包括机械手、贯入控制系统。
上层数据采集控制系统包括电阻率、声学、超孔隙水压力、海水电池、环境监测设备的控制舱和数据采集舱。
下层搭载平台主要搭载了电阻率监测探杆、声学监测探杆、超孔隙水压力监测探杆、环境要素传感器、倾斜姿态测量传感器等监测设备;下层的坐底贯入控制系统用于将电阻率探杆、声学探杆、超孔隙水压力探杆贯入沉积物中,具体包括机械手、贯入油缸和贯入控制单元。其工作原理为机械手通过上下加持探杆配合贯入油缸实现上下移动,可将四根探杆(一根垂直电阻率探杆、两根声学探杆、一根超孔隙水压力探杆)依次分步贯入沉积物中。其中一次贯入行程 50 cm,可提供 20 kN 的贯入力。
1.2 监测系统
1.2.1 声学监测系统
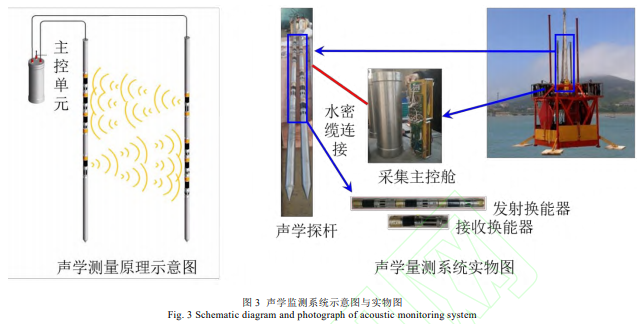
声学监测系统通过建立海底沉积物声学参数与沉积物物理力学参数之间的关系,从而实现用声学方法对海底沉积物土力学性质进行长期监测[12-15]。声学监测系统采用一发三收模式,获取海底以下一定深度范围内沉积物的声速和声衰减。
声学测量系统的组成包括:两根声学探杆(声学探杆 A、B)和一个声学主控舱。使用时,将两根声学探杆悬浮于探测点海底沉积物上方水中,测量海水声速和水中声压幅值,配合 CTD 进行标定。
两根声学探杆 A、B 的中心间距为 600 mm。每根声学探杆长 3 m,直径 58 mm,包含一个高灵敏度发射换能器、三个高灵敏度接收换能器和钛型钢管。声学探杆 A 上从上到下依次有一个发射换能器(T1)和三个接收换能器(R4,R5,R6),发射换能器(T1)距最近的接收换能器(R4)的中心间距为 700 mm,相邻接收换能器(R4,R5,R6)的中心间距为 300 mm;声学探杆 B 从上到下依次有三个接收换能器(R1,R2,R3)和一个发射换能器(T2),各换能器间距同探杆 A;声学换能器采用纵向振动陶瓷片组成,整个换能器采用水密设计,能够承受的静止水压力为 15 MPa,即 1 500 m 水深,换能器的工作频带为 20~100 kHz,接收灵敏度为—212 dB。探杆底部为锥形贯入头,方便贯入沉积物中,如图 3 所示。
声学主控舱主要包括压力密封舱和声学发射采集电路板。压力密封舱主要用于盛放声学电路,耐压 1 500 m;声学发射采集电路板主要用于控制声学换能器发射采集参数的修改和采集数据的存储,主要包括控制电路、多通道(1 发 3 收)触发信号电路、发射驱动电路、采集与信号放大电路、数据存储模块以及供电电路组成。
1.2.2 电阻率监测系统
电阻率监测系统通过建立海底沉积物电阻率与物理力学参数关系,对海底沉积物物理力学性质进行原位长期监测[16-19]。该电阻率监测系统借鉴陆地井地电阻率探测方式,采用二级装置进行三维电阻率探测。探测时,垂直电阻率探杆的供电电极进行供电,垂直探杆的测量电极和四根电阻率水平探杆的测量电极进行同时测量,从而实现海底三维电阻率测量。
电阻率监测系统组成包括控制舱、一根垂直电阻率探杆和四根平面十字交叉的水平电阻率探杆。控制舱:包括压力密封舱和电阻率测量电路板。压力密封舱的尺寸为 400 mm×400 mm,电阻率测量电路板密封于压力舱中。电阻率测量电路板包括四部分:中央控制电路、三维电阻率并行采集电路、垂直探杆电极转换与采集电路、供电电路。电阻率测量精度优于 1%,电压测量范围为 16.7 nV~3.31 V,输出电流范围为 0.19~26 A。电阻率标定采用 10 欧姆标准电阻三串联,通过以下公式计算出电阻 R 与标准电阻值比较,完成电阻率监测系统的标定。
R = ΔV/I
式中,R 为电阻率,单位为 Ω,ΔV 为电压差,单位为 V;I 为电流,单位为 A。
垂直电阻率探杆:包括探杆杆体、环形电极和电极控制舱。探杆总长度为 4 500 mm,直径为 65 mm。探杆杆体采用一体成型模式,将环形电极嵌套在探杆杆体上,探杆底部安装有底锥以便于贯入。探杆中共有 60 个电极环,每个电极环极距为 65 mm;环形电极采用工业纯钛材料,耐压耐腐蚀,能实现海底长期有效观测。电极控制舱与各电极单独连接,采用电极开关矩阵结构实现电极与采集通道的复合选择,最终实现 Wenner 滚动采集。
水平电阻率探杆:水平电阻率探杆共有 4 根,每根水平电阻率探杆都包括探杆杆体和测量电极。探杆杆体材料为 PPR,可承受 1 500 m 水深的压力。每根探杆长 3 m,外径 50 mm,内径 10 mm。探杆上每隔 10 cm 内嵌有宽度为 1 cm 的石墨烯环状电极用于测量电位,所有电极都通过内置的 10 芯电缆和主控箱的采集电路相连。
1.2.3 超孔隙水压力监测系统
海底土超孔隙水压力是指海底沉积物中因剪切作用、快速沉积、气体逸散或地热梯度引起的平流等其他物理化学变化导致的土体中孔隙水压力高于正常压力的状态[20]。由于沉积物在剪切作用时,根据有效应力原理,孔隙水压力的升高,即海底土超孔隙水压力的增加会降低抗剪强度,从而导致海底沉积物失稳。目前,许多学者都研究了海底沉积物超孔隙水压力的问题,但多集中于浅海[20-23]。针对深海高静水压力和探测难的问题,我们研发了海底土超孔隙水压力动态变化监测系统,该监测系统可以实现原位高精度测量海底土超孔隙水压力。
本系统采用的超孔隙水压力传感器为压差式光纤光栅孔压传感器,其特点是采用“压差式开放结构”,利用静水压力平衡沉积物实际孔隙压力,通过测量海底面附近海水的静水压力与沉积物实际孔压的差值来获得高精度的超孔隙水压力数据。
系统组成:海底土超孔隙水压力动态变化长期监测系统主要包括压差式光纤光栅孔压传感器、超孔隙水压力探杆和超孔隙水压力主控采集舱三部分。
超孔隙水压力传感器:超孔隙水压力传感器采用“压差式开放结构”,即采用弹簧管对测得的压力差值进行转换,将海底土体的超孔隙水压力转化为弹簧管的变形,弹簧管的变形又作用在涂覆的光纤光栅上,从而使光的波长发生偏移,通过计算该偏移量可以获得海底沉积物的超孔隙水压力[24] 。由于采用了压差式开放结构,超孔隙水压力传感器可以对参考压力变化进行自我补偿,从而剔除潮汐和气压等的影响。此外,该压力传感器内部自带有温度传感器,测量的压力值为修正温度后的压力值,排除了温度对超孔隙水压力传感器的影响。
超孔隙水压力探杆主要包括不锈钢探杆、传感器法兰、透水石和贯入锥尖。超孔隙水压力探杆长 5 m,直径 70 mm,内部连接有 4 个间距 1 m 的光纤光栅压差式传感器;传感器与探杆通过传感器法兰螺纹连接,从而保护传感器;传感器外有透水石,起到透水、透压和保护传感器的作用;探杆底部为不锈钢锥尖,便于减少超孔隙水压力探杆贯入土体时所受的阻力。
超孔隙水压力主控采集舱:由密封副舱、光纤水密连接器、密封舱、光纤光栅解调仪组成。光纤光栅解调仪用于产生激光光源,激光光源通过光纤水密连接器进入光纤光栅压差式传感器中,此外光纤光栅解调仪还用于光纤数据的采集与解译。
1.2.4 海洋水动力长期监测系统
海洋水动力作为海洋工程地质环境的重要组成部分,对海底沉积物的形成和改造具有重要影响,也对海洋工程建设和海洋油气资源开采具有重要影响[25]。海水动力长期监测系统主要依靠声学、光学等设备进行海水动力的长期监测[26]。该监测可以实现海底边界层温度、盐度、深度、压力、水体流速流向、海水浊度及甲烷浓度等环境要素观测,为海洋工程地质环境的评价提供了参考依据。
系统组成:包括 ADCP、温盐深浊度计(RBR)、甲烷传感器、三维声学流速仪等仪器。
1.3 通讯控制系统
1.3.1 通讯系统
针对深海沉积物测量难度大、数据采集成本高的问题,我们建立了一套海底长期监测数据的海空-地实时数据传输系统。
海-空-地通讯系统主要通过中继浮标上的水声通讯和卫星通讯相结合的办法工作。水声通信模块可以使海床基监测平台具有实时命令交互,设备状态信息、监测数据传输等功能,能够将所监测的电阻率、孔隙水压力、姿态、声波信息、海流、海水浊度、海底距离等实时传输到海面通信中继平台上。卫星通讯模块可将海面通信中继平台的数据传输到实验室中,并能在陆基端实现双向控制采集。水声通讯机的通讯速率为 13.9 kbps,通讯距离为 3 500 m。海面中继浮标通过锚定的方式布放在观测海域,可以保证水声通讯距离的有效性和通讯速率的稳定性;北斗卫星通讯系统的通讯速率为 72 byte/min。该设备还内置有多重数据自容备份功能以防数据丢失。
1.3.2 控制系统
控制系统可实现对所有传感器的控制,包括采集、通电、数据存储与通讯等,主要有总控舱完成相应工作。主要包括远程服务器、海面通讯中继平台、海床基监测平台三部分。远程服务器主要以软件为主,通过串口控制陆基卫星通讯机;海面通讯中继平台以单片机为主,通过串口控制中继平台上的卫星通讯机和水声通讯机;海床基监测平台控制系统主要负责系统的电源管理、任务调度、数据存储和数据传输。控制系统可通过独立的通信接口和电源接口控制电阻率、声波、超孔隙水压力、海流、浊度、高度计、压力计、方位姿态、水声通信机的数据采集和设备通断电,并通过控制坐底贯入控制系统控制机械手的贯入、拔出等动作。所有平台的控制系统整体均封装在承压舱中,提供与观测仪器的水密接口和线缆,承压水深大于 1 500 m。中央控制系统可实现对所有传感器的控制,包括采集和通电,主要有总控舱完成相应工作。
1.4 供电系统
电能供应是海底长期观测设备的难题之一,特别是深远海地区不具备远距离电缆供电的条件。若采用常规锂电池长期供电,则耐压舱体体积将会巨大,不易装配且存在巨大的安全隐患[27]。针对该问题,我们研制了一种安全、经济、高效、环保的具有再生能源特点的海水溶解氧电池,为海底长期观测提供电能。
工作原理:海水电池的负极为镁合金,正极为碳纤维刷,电解质为海水。供电时,镁棒作为负极失电子,碳纤维毛刷作为正极得电子,在海水中形成海水电池进行发电。海水电池发电后经升压处理后将电能储存在蓄电池储能模块,供系统其他设备进行使用。海水电池采用分布式设计,在海床基监测系统四周分别安装有四个海水电池,可最大化利用系统周围的海水资源进行发电。
海水电池的额定输出功率为 6 W,体积功率比为 15 W/m3,能量密度为 700 Wh/kg,可在溶解氧浓度≥3 mg/L,海水流速≥2 cm/s,海水盐度≥20‰的环境持续发电工作,能适应多数情况下海洋环境条件。同国外海水电池相比,比功率密度提高 5 倍以上,电池体积减少 80%。
2 海试应用
2.1 系统海试概况
2.1.1 近海海试
2017 年—2020 年期间,我们在青岛即墨国家深海基地管理中心进行了大量长期原位测试,分别对机械手贯入拔出情况,总控命令执行返回情况,海水电池发电稳定性,电阻率、声学、超孔隙水压力等各传感器工作情况、海-空-地数据传输稳定性、设备整体稳定性进行了测试,并进行了最长连续一个月的原位长期监测。
2.1.2 南海海试
2019 年 5 月,观测设备搭载“海洋地质六号”,于南海北部陆坡(水深 1 450 米)进行了深海海试,获取了设备位于水深 500 m、1 000 m、1 400 m 时各传感器数据及工作状态;2019 年 6 月,观测设备搭载“东方红三号”,于南海北部陆坡(水深 1 560 米)进行了深海海试,设备坐底贯入并获取了海底沉积物的声学、电阻率、超孔隙水压力;海底的沉降变形;海底边界层的温、盐、深、流、浊度、溶解氧、甲烷浓度等环境要素;2019 年 12 月,观测设备搭载“张謇号”,分别获取了设备在 50m、100 m、500 m、800 m、1 000 m 的测试数据;2019 年 11 月,设备搭载“张謇号”在南海北部陆坡进行了深海长距离声学通讯传输测试,对采集数据进行了处理分析,据此提出了控制命令简化、预设自动贯入、自动采集等优化方案。
2.2 海试数据
2.2.1 原始数据与处理方法
为满足监测采集单元快速高频的数据采集需求,我们将采集的未解码原始数据进行二进制存储,原始数据的存储格式为二进制 bin 文件。电阻率、声学、超孔隙水压力的原始数据格式各不相同。在读取原始数据时,需将原始数据进行解译处理,包括去除总控包头、各系统包头、校验位等,然后解译为十进制后进行数据处理校正得到最终数据。
2.2.2 电阻率典型海试数据结果
电阻率作为表征沉积物导电特性的基本物性指标之一,其特性与沉积物物理力学性质关系密切,因此电阻率测量在海洋地质调查、油气水合物资源探勘中得到了广泛的应用。目前,海底沉积物电阻率的研究多集中于海底沉积物的单次测量,缺少对海底沉积物性质变化的连续测量[28-34]。本团队利用研发的具有自主知识产权的复杂深海工程地质原位长期监测系统中的海底沉积物电阻率监测模块,实现了对海底沉积物的电阻率进行了连续、长期监测。
本团队对海底沉积物电阻率进行了长期连续自动采集,电阻率测量精度高、测量数据稳定。在电阻率测量曲线和测量云图中的两个高电阻区为两个机械手区。第一个机械手的位置为 Num=13、15 处,电阻率测量范围为 1.210~1.814 Ω·m,平均值为 1.499 Ω·m;第二个机械手的位置为 Num=35、37 处,电阻率测量范围为 0.085~ 1.178 Ω·m,平均值为 0.999 Ω·m,以上两个机械手皆位于水中。此外,在 Num=44 处还可看到一个次高电阻率区,距离锥尖 96.5 cm,阻值范围为 0.085~ 0.237 Ω·m,平均值为 0.207 Ω·m,为水土界面位置。——论文作者:孙志文 1, 2 , 贾永刚 1, 2, , 郭秀军 1, 2 , 孙中强 1, 2 , 李 凯 1, 2 , 范智涵 1, 2 , 陈天 1, 2 , 唐浩儒 1, 2
SCISSCIAHCI