0
留言稍后联系!

发布时间:2022-02-24所属分类:电工职称论文浏览:1708次
摘 要: 摘 要:设计了一种可对室内电气设备进行自动巡视的机器人。通过对变配电室内现场情况的实际情况调查,提出对电气柜相关仪表进行拍照取样和对柜体接触检测的方案。将机器人分成移动平台(AGV小车)、控制系统(工业平板、PLC、相关传感器等)、主体机械结构(小摆臂结构,大

摘 要:设计了一种可对室内电气设备进行自动巡视的机器人。通过对变配电室内现场情况的实际情况调查,提出对电气柜相关仪表进行拍照取样和对柜体接触检测的方案。将机器人分成移动平台(AGV小车)、控制系统(工业平板、PLC、相关传感器等)、主体机械结构(小摆臂结构,大摆臂结构和主升降架)。通过控制移动平台移动到固定的检测点,主体机械结构进行升降及旋转,工业照相机拍照,相关传感器检测。从试用情况看,巡检机器人完成了研制要求,实现了巡检自动化。
关键词:巡检机器人;接触式检测;摆臂结构;提升结构
0 引 言
近年来,中国铁路迅速发展,不仅是铁路轨道与火车本身,相配的铁路电力变配电所的数量也在不断增加,电力事故安全隐患也呈上升趋势,这直接影响到了铁路运营本身。在铁路总体安全方面,从我国历年的统计数据来看,无论是发生次数,还是直接经济损失,电力事故都是不容忽视的部分[1-2]。目前,这些配电所的巡视主要还是采取传统人工巡检的方式,有着不少问题:1)人员问题。当前电工人员配给不足,维护人员水平有限,加上值班人员长期处于加班、疲劳的状态,无形中给配电所的安全带来隐患。2)数据问题。采用人工巡检方式的配电房运行数据记录多不完整,一般只有最基本数据可以由运行值班人员通过记录相关运行数据记录来实现。通常也不进入计算机系统,无法为大数据应用服务。3)故障预报问题。由于人工采集的数据量较少,数据种类不全面,覆盖面不够,离散性较大,且多为纸上数据,所以也就无法预先发现配电房内设备的潜在故障,也无法第一时间在故障发生时上报等缺点,最终导致用电可靠性大幅降低。4)运行监控问题。虽然现有的电力运行有相应的监控系统,但配电房环境还没有实现自动实时监测运行状况,也就较难实现电力事故的预防和控制。
由于机器人巡检相对于前两种具有接近巡检对象、安全性高和成本相对低廉的优势,因而巡检机器人成为了国内外研究热点[3] 。
1 巡检机器人的系统组成
该巡检机器人主要由三部分组成:移动平台(AGV小车),电气控制柜,主体机械结构(如图1)。移动平台作为变电站巡检机器人的重要组成部位,根据行走机构特点,可以分为轨道式、轮式、履带式3种主要类型 。经一番比较,选择AGV小车这种轮式结构作为移动平台,它主要负责运载机器人主体在室内沿着磁条轨道运动,及在铺设的多处站点(地标卡)处停下,使得机械结构能进行运动和对室内柜体的检测;电气控制柜中主要装有PLC 控制线路和工业平板电脑,用于控制AGV小车、机械结构的运动和对检测信息的接收分析处理显示;主体机械结构则分为3块,分别为小摆臂、大摆臂和主升降架,其中小摆臂和主升降架上装有工业摄像头,用来读取室内电气柜上各种信息以传递给工业计算机处理,大摆臂上则装有电压传感器和红外温度传感器。
2 巡检机器人主要机械结构的设计
2.1 大、小摆臂的设计
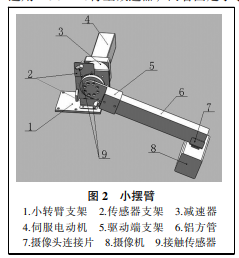
由于巡检内容中有高度较低(0.3 m)的项目,低于 AGV小车的高度,加上在机器人休息(回原点充电)时,要求全部机械结构收回到AGV小车上方,这就需要摆臂在工作时下摆到AGV小车上平面以下,如图2所示。
为满足抓手在抓紧钢轨所需的转矩要求,选用步科 SMC60S型号的步进电动机,与步进电动机配合的减速器选用PL90P-40行星减速器,两者固定于小转臂支架,输出 端 连 接 方管,再连接上摄像头。小转臂支架上固定有两传感器支架,两支架上各有一接触传感器,用于检测转臂位置,传感器支架上有腰孔,用于调节传感器位置,进一步使得调节小转臂极限位置更为方便。
与小摆臂上安装的相机不同,大摆臂末端安装的是带有一定柔性的传感器组件(传感器盒)。大摆臂的设计如图3所示,基本结构与小摆臂类似,利用伺服电动机、减速器带动摆臂的转动,不同的是增加了一套同步带系统,带轮大支架1固定于转臂支架上,而带轮大支架中安装有同步带轮3,同步带2一端连接于同步带轮3,另一端连接固定在带轮小支架 5 上 的 同 步 带轮,该同步带轮内装有轴承,再通过销轴固定于支架板4上。由于同步带轮3被固定在带轮大支架3上,是无法转动的,当摆臂转动一个角度时,同步带2会随之运动,同步带会相对于同步带轮2 转动一个相同的角度,正好等于同步带相对带轮小支架5转动的角度。于是,带轮小支架相对于同步带转动的角度与同步带(铝方管)相对于转臂支架(地面)转动的角度相互抵消,即带轮小支架相对于转臂支架(地面)无转动。因此,只要安装时保持带轮小支架上表面水平,那么无论摆臂如何转动,支架上表面始终保持水平,这为其上方安装的传感器盒提供了平台。
2.2 传感器盒的设计
传感器盒中有三种传感器——放电传感器、红外温度传感器和微动传感器,其中放电传感器、红外温度传感器是为了监测电气柜内放电以及表面温度状况,而微动传感器是为了实现摆臂转动的止动设置的。
传感器盒的结构如图4所示,底板上安装有直线轴承座,两根套着有一定预压缩量弹簧的光轴一端固定在传感器盒上,另一端穿过直线轴承,传感器盒上装有鱼眼轴承和微动传感器 支 架 ,再分别固定上放电传感器和微动传感器。底板固定在大摆臂上。
巡检机器 人 工 作时,到达地标卡设定位置,大摆臂向电气柜方向 转 动,传感器盒贴近电 气 柜,直到微动传感器碰到电气柜,作用大摆臂再转动一个固定角度,使放电传感器能贴合在电气柜上检测电压。由于传感器盒上弹簧和鱼眼轴承的设置,无论是AGV车身偏斜、大摆臂转动角度有偏差,还是电气柜柜体倾斜,放电传感器都能转过一定的角度,紧密贴合在电气柜上进行工作。
2.3 主升降机架的设计
主升降架上安装摄像机,用于检测电气柜上指示灯的状态、记录表头的数据及检测柜门的开合状况。
主升降架结构如图5所示,线性模组固定在底座上,采用 SM60S伺服电动机驱动。模组滑台上固定有方管,方管上装有线性导轨,导轨滑块与摄像机支架连接。方管的上下端各装有一轴,轴上装有轴承和同步带轮,轴承分别由轴肩内侧的套筒定位。同步带可在两同步带轮上转动,同步带一侧通过压板和连接片固定在线性模上,另一侧也通过压板和连接片固定在摄像机支架上。
当模组滑台上升时,方管相对于固定在模组上的同步带向上移动,即同步带开始转动,方管相对模组上升的高度等于摄像机相对于方管上升的高度,形成了一个二级提升的结构,使摄像头能够提升到足够高的位置(2.5 m),另外摄像机下方连接有步进电动机可以转动,这使得主升降架上的摄像机可以多角度全方位地进行拍摄工作。
3 结 论
电气柜自动巡检机器人实现了室内电气设备的巡检自动化,减轻了工作人员的劳动强度,降低了企业的劳动力成本,大大提高了工作效率。大摆臂结构采用的同步带系统、传感器盒采用的弹簧及鱼眼轴承组合成的一种接触式检测结构,为设备检测提供了新的思路。智能巡检机器人仍然有很大的发展空间,例如实现巡检机器人更精细化的操作,智能巡检机器人改变了传统的室内电气设备巡检方式,对今后设备巡检领域的发展意义深远。 ——论文作者:朱家诚, 方明进, 魏泽旭, 郭亚杰
[参 考 文 献]
[1] 罗俊豪,颜雨薇.变电站自动巡检机器人系统及其关键技术[J]. 电气应用,2014,33(13):80-84.
[2] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J]. 电力系统自动化,2011,35(19):85-88,96.
[3] 何缘,吴功平,王伟,等.高压输电线路智能巡检机器人的研制与应用[J].武汉大学学报(工学版),2016,49(3):446-451,464.
[4] 杨旭东,黄玉柱,李继刚,等.变电站巡检机器人研究现状综述[J]. 山东电力技术,2015,42(1):30-34.
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

