0
发表咨询在线!

发布时间:2022-02-25所属分类:电工职称论文浏览:1815次
摘 要: 摘要:回顾了国内外高压输电线路除冰机器人的研究现状。针对不同除冰机器人的结构特点,设计了冲击式、铣削式和碾切式三种除冰机构;给出除冰机构切削力、功率等关键参数的理论计算结果,并设计了相应的除冰实验,验证了除冰机构设计的有效性。 关键词:除冰机器人;除冰

摘要:回顾了国内外高压输电线路除冰机器人的研究现状。针对不同除冰机器人的结构特点,设计了冲击式、铣削式和碾切式三种除冰机构;给出除冰机构切削力、功率等关键参数的理论计算结果,并设计了相应的除冰实验,验证了除冰机构设计的有效性。
关键词:除冰机器人;除冰机构;冲击除冰机构;铣削除冰机构;碾切除冰机构
0 引言
严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线及绝缘子闪络,由此引起的线路跳闸、供电中断等事故将给工农业生产和人们生活造成严重影响。研究有效的线路抗冰融冰技术,最大限度地避免和防止冰灾对输电线路造成的危害,已成为国内外电力工业一个有待解决的重要课题。
目前,国内外主要采用外力敲打法、大电流热融法实施除冰,然而,受技术、能耗、成本及安全性等因素的限制,现有除冰方法具有较大局限性[1]。随着机器人技术的发展,采用机器人进行输电线路 除 冰 已 成 为 可 能。与 传 统 除 冰 方 法 相 比,采 用机器人除冰具有无人员伤亡、无需停电和转移负载等优点,无除冰作业时,机器还可作巡线,其发展前景广阔。当前,国内外除冰机器人研究尚处于起步阶段,各项关键技术还未建立统一的标准。
1 国内外研究现状
目前机器人在输电线路上主要应用为线路巡检[2-4],巡 线 机 器 人 的 研 究 始 于 20 世 纪 80 年 代末,日本、加拿大、美国等发达国家先后开展了巡线机器人 的 研 究 工 作[5-8]。90年 代 末,国 内 的 一些研究机构陆续开展了巡线机器人的研究工作[9-11],并取得了一定的研究成果。
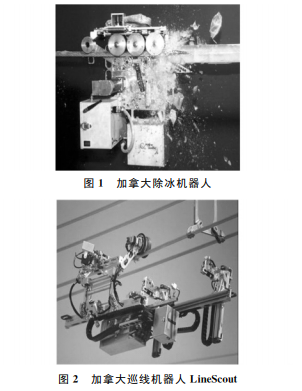
与巡线机器人相比较,国内外对除冰 机 器 人的研究鲜有报道,较早出现的输电线路除冰机器人装置有加拿大魁北克水电研究院于2000年开始研制的 LineROVer遥控小车[12]。该遥控小车起初用于清除电力传输线地线上的积冰,后逐渐发展为用于线路巡检、维护等多用途移动平台,通过安装不同的工作头可完成架空线视觉、红外检查、压接头状态评估、导线清污和线路除冰(图1)等不同作业任务,其缺点在于无越障能力,只能在两线塔之间作业。通过技术的不断 改 进[13-16],该研究组于2006年研制出结构更为复杂、功能更加完备,具 备 越 障 功 能 的 LineScout输 电 线 巡 检 机器人(图 2),但 该 巡 检 机 器 人 不 具 备 除 冰 功 能。在国内,山东电力研究院与加拿大魁北克水电研究院进行合 作,对 LineROVer小车在能源动力、远 程 通 信 与 控 制、防水性能等方面 做了技术改进[17],完善了机 构 的 性 能,但 仍 不 具 备 越 障 能 力(图3)。湖 南 大 学 在 国 家 科 技 支 撑 计 划 资 助 下,联合国防科学技术大学、武汉大学和山东大学等多家单位,研制开发了单体除冰机器人(图4)和可越障除冰的两臂除冰机器人(图5)、三 臂 除 冰机器人(图6),积累了一定的研发经验。
由于除冰机器人工作在恶劣环境中,故 在 结构、功能、动力、通信等方面都有特殊的 要 求。其中,除冰机构是除冰机器人区别于巡线机器人的重要特征,研制高效无损伤除冰机构对推进除冰机器人研究具有重要意义。
2 除冰机构设计
除冰机构在保证不损伤输电线的同 时,应 尽可能实现快速、长时间、远距离的在线除冰。湖南大学项目组根据研制的除冰机器人结构特点,分别 设 计 了 相 应 的 冲 击 式、铣削式和碾切式除冰机构。
2.1 冲击式除冰机构
2.1.1 机构描述
如图7所示,冲击式除冰机构安装于机器人前端,输电导线从除冰机构中心孔穿过。刀具由五片均匀分布并固定在支撑圆盘上的破冰钢刀以及与之 相 连 的 出 力 机 构 组 成。冰 刀 端 口 呈 尖 锥形,开口沿输电线指向机器人前进方向。冰刀支撑圆盘与一个方形滑块相连,滑块末端装有拉簧挂板,一对水平安装的横向拉紧弹簧对称安装于滑块两侧位置。弹簧的一端固定在机体上,一端与拉簧挂板相连。除冰电机带动凸轮运动实现弹簧的拉伸,在弹簧力作用下带动破冰刀沿输电导线方向高速往复冲击除冰。
2.1.2 设计计算
覆 冰 的 主 要 力 学 性 能 为:环 境 温 度 t=-10℃时,覆冰的平均密度ρ=850kg/m3左右,抗压强度σc=3.09MPa,抗剪强度στ=0.45MPa。
单个冰刀除冰分析剖视图如图8所示。冰刀的刃宽 度 B =0.1mm,刃 与 电 线 平 面 的 夹 角 为25°。
2.2 铣削除冰机构
2.2.1 机构描述
两臂式除冰机器人采用图9所示除 冰 机 构。为了适应机器人的越障除冰动作以及机器人的越障动作,除冰装置上设计了两个相互垂直的移动副,使得除冰装置可实现相对于机器人的整体升降以及两个铣刀之间的开合运动。
直流伺服电机安装在固定的 U 形轴内,其输出轴与接盘连接,接盘与冰刀连接。这一嵌装式结构使得电机整体实现了密封。当两个除冰刀电机正反向旋转时,通过接盘带动两冰刀作正反向旋转,从而可实现高效率无损伤除冰作业。
2.2.2 设计计算
初步估计 除 冰 速 度 为 150m/h,即 除 冰 速 度v=2.5m/min,按照线路导线为 LGJ400/50进行计算,导 线 直 径 为 27.63mm;导 线 覆 冰 厚 度 为35mm,则导线覆冰后形成冰柱(中 心 含 导 线)的直径为98mm。除冰分析示意图如图10所示。
2.3 碾切除冰机构
2.3.1 机构描述
三臂除冰机器人采用的是切削除冰机构(图11),该除冰机构由薄饼电机驱动组合切削刀切削覆冰。组合切削刀由6片切削刀片、4个垫片与2个防切削板组成,除具有切冰的功能以外,还具有防止切削高压电线的功能,即当上半部分冰被切除以后,两边对称的保护板会卡在高压电线上,保护切削刀不破坏电线。组合切削刀由薄饼电机驱动,质量仅为0.7kg。
2.3.2 设计计
算初步选择铣刀 直 径 为 D=150mm,厚 度h=4mm,铣 刀 齿 数 为 Z=60,每 齿 的 齿 面 宽 度 为0.2mm。除冰速度为1m/min,刀具(齿数为60)的转速为60r/min,除冰分析示意图见图12。
3 实验分析
计算结果为除冰电机选型提供了理 论 依 据。为进一步验证除冰机构设计的合理性,设计了简单有效的除冰测试实验。
3.1 冲击式除冰实验
冲击式除冰机构的设计较为成熟。文献[18]对研制的 LineROVer机器人进行了输电线除冰测试(图1),采用的除冰装置结构与本文设计的冲击式除冰机构相类似,测试结果表明该结构除冰效果良好。
3.2 铣削式除冰实验
图13 铣削式除冰实验为了验证铣削除冰机构的除冰性能,在 实 验室进行模拟线路除冰实验。实验中在输电线周围附上直径110mm 的 圆 柱 形 冰 柱,然 后 将 两 臂 除冰机器人悬挂在输电线未覆冰的一段上(图13)。除冰实验前,前臂和后臂的压紧轮上移压紧,除冰刀以450r/min速度旋转并合拢至限位,开启机器人行走电机使其以3m/min速度行走。行走过程中,除冰刀逐渐切削钢管上的覆冰,切 屑 四 周 飞溅,并伴有较大冰块破裂跌落,除冰效果显著。
3.3 碾切式除冰实验
在充分考虑实际覆冰的基础上,采用一台简易钻铣床(图14),功率基本与除冰装置功率相似,利用弹簧秤测量其除冰力数值。铣刀安装在机床主轴上,直 径 为 85mm,厚 度 为 3mm,转 速 为 320r/min,切削 深 度 不 小 于30mm,切 削 速 度 不 小 于6.4m/min,实 验 样 件 采 用 直 径 为 80mm,长 度 为150mm 的冰块。实验时,迅速取出冰块夹持在台钳上,用弹簧秤打动台钳实现切削进给运动,并测量拉力,此拉力可近似为切削冰块所需切向力。
经反复测试,初 步 确 定 冰 块 切 削 力 矩 在6~11N·m 之间,电 机 功 率 在100~120W 之 间,转速为200~300r/min。将单个铣刀的切削力矩实验结果与理论计算值相比较,两者数值基本相符,从而验证了计算与理论分析的一致性。
由于真实输电线覆冰环境难以取得,因 此 上述测试过程均在实验室环境完成。目前课题组正在加快输电线路模拟覆冰实验室建设,该实验环境全 部 设 备 采 用 1∶1 比 例 模 拟 现 场 环 境 (图15),根 据 实 际 作 业 需 求,考 虑 不 同 线 路 类 型、坡道、障碍、电压等级等复杂情况以及可以实现在局部小环境下模拟现实中低温、冰冻灾害环境,为后续机器人调试提供一个真实的现场环境。
4 结束语
输电线路除冰机器人是电力特种机器人研究领域的最新研究课题之一,研制无损伤高效除冰机构,是 除 冰 机 器 人 高 效 稳 定 运 行 的 重 要 保 障。本文设 计 了 除 冰 机 器 人 的 重 要 机 构———除 冰 机构,并给出了除冰电机功率的相关计算,实验表明除冰机构除冰效果良好。由于除冰机器人是一个复杂的系统,故除冰机构在改进以及和其他模块的配合中还有很多工作需要开展。随着机器人技术的发展和机器人各项性能的不断完善,相信除冰机器人发展的前景是非常广阔的。——论文作者:魏书宁 王耀南 印 峰 杨易旻
参考文献:
[1] 黄强,王家红,欧名勇.2005年湖南电网冰灾事故分析及其应对措施[J].电网技术,2005,29(24):16-19.
[2] 张运楚,梁自泽,谭民.架空电力线路巡线机器人的研究综述[J].机器人,2004,26(5):467-472.
[3] 王鲁单,王洪 光,房 立 金,等.输电线路巡检机器人越障控制研究[J].中 国 机 械 工 程,2007,18(22):2652-2655.
[4] ToussaintK,PouliotN,MontambaultS.Trans-missionLineMaintenanceRobotsCapableofCross-ingObstacles:State-of-the-artReview andChallengesahead[J].Journalof Field Robotics,2009,26(5):477-499.
[5] SawadaJ,KusumotoK,MaikawaY,etal.A Mo-bile RobotforInspectionofPower TransmissionLines[J].IEEE Transactionson PowerDelivery,2002,6(1):309-315.
[6] EliotT.RobotsandExamineLiveLinesinSeverCondition[J].ElectricalWorld,1989,5:71-72.
[7] KobayashiH,Nakamura H,ShimadaT.AnIn-spectionRobotforFeederCables-basicStructureandControl[C]//InternationalConferenceonIndus-tralElectronics,ControlandInstrumentation.Ko-be,Japan:IEEE,1991:992-995.
[8] PeungsungwalS,PungsiriB,ChamnongthaiK,etal.AutonomousRobotforaPowerTransmissionLineInspection[C]//The2001IEEEInternationalSymposium on Circuits and Systems. Sydney:IEEE,2001:121-124.
[9] 王鲁单,王洪 光,房 立 金,等.一种输电线路巡检机器人控制系统的设计与实现[J].机器人,2007,29(1):7-11.
[10] 周风余,吴爱国,李贻斌,等.高压架空输电线路自动巡线机器人的研制[J].电力系统自动化,2004,28(23):89-91.
[11] 吴功平,肖晓晖,郭应龙,等.架空高压输电线自动爬行机器人 的 研 制[J].中 国 机 械 工 程,2006,17(3):237-240.
[12] MontambaultS,PouliotN.OntheEconomicandStrategicImpactofRoboticsAppliedtoTransmis-sionLine Maintenance[C]//The7thInternationalConferenceonLive Maintenance.Bucharest,Ro-mania:2004:1-8.
[13] MontambaultS,PouliotN.LineScoutTechnolo-gy:DevelopmentofanInspectionRobotCapableofClearing Obstacles While OperatingonaLiveLine[C]//The11thInternationalConferenceonTransmissionandDistributionConstruction,Op-erationandLive-lineMaintenance.Albuquerque,NM:IEEE,2007:15-19.
[14] PouliotN,MontambaultS.GeometricDesignoftheLineScout,a Teleoperated RobotforPowerLineInspectionandMaintenance[C]//IEEEInter-nationalConferenceonRoboticsandAutomation.Pasadena,USA:IEEE,2008:3970-3977.
[15] MontambaultS,PouliotN.DesignandValidationofa MobileRobotforPowerLineInspectionandMaintenance[C]//The6thInternationalConfer-enceon Fieldand Service Robotics.Chamonix,France:Springer,2008:495-504
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

