0
留言稍后联系!

发布时间:2022-03-02所属分类:电工职称论文浏览:1556次
摘 要: 摘要:基于高压输电线路巡线机器人的研究,结合高压输电线路上覆冰的去除方法,设计了一种新型的高压输电线路除冰机器人。采用 ADAMS软件对该机器人进行了运动学、动力学分析及仿真。结果表明,该机器人能在输电线上稳定地行走,并能较好地解决自主越障的问题,可完成

摘要:基于高压输电线路巡线机器人的研究,结合高压输电线路上覆冰的去除方法,设计了一种新型的高压输电线路除冰机器人。采用 ADAMS软件对该机器人进行了运动学、动力学分析及仿真。结果表明,该机器人能在输电线上稳定地行走,并能较好地解决自主越障的问题,可完成输电线上的除冰任务。
关键词:架空输电线路;除冰机器人;越障;运动学;动力学;仿真
近年来,在俄罗斯、加拿大、美国、日本、英国、芬兰、冰岛和中国等众多国家,由于输电线路上的覆冰和积雪常引起线路跳闸、断线、倒杆、绝缘子闪络和通信中断等事故,造成了巨大的经济损失。因此,研制安全有效的输电线路除冰机械以代替人工除冰对保护电网的安全运行和减少人员伤亡均具有重要的现实意义。目前,国内关于此方面的研究较少,主要由山东电力研究院在做相关的研究,但并无成熟的样机出现,国际有关机构虽在此方面进行了试验研究,但离实用化尚有很大距离。鉴此,本文基于高压输电线路巡线机器人的研究[1],自主研制了一种稳定性好、工作效率高的双机械臂附加除冰装置与夹紧装置式的除冰机器人,并对机器人进行了运动学、动力学分析及动力学仿真,以验证设计的合理性与可行性。
1 障碍类型与除冰机器人模型分析
1.1 障碍类型
构成架空输电线路的主要元件有:基础(底盘、卡盘、现浇或预制钢筋混凝土、岩石、掏挖、桩基等)、导线(架空地线、接地网)、避雷线、电杆(水泥杆、横担、拉线及拉盘、铁塔)、绝缘子串、各种金具等。这些元件有机地组合在一起就形成了一条架空输电线路。而机器人作业时必须能跨越防振锤、悬垂金具及转折线[2]3种类型的障碍物。其中,防振锤安装于架空地线上,以抑制输电线路在风作用下产生的振动。悬垂金具分单、双悬垂金具,单悬垂金具间的距离约400mm,双悬垂金具是由两个单悬垂金具组成。转折线在输电线路改变方向的耐张塔路段内[3]。
1.2 除冰机器人结构设计
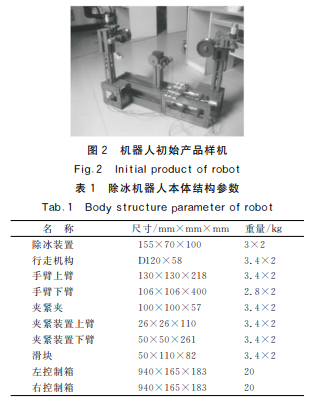
由于机器人的工作环境复杂,因此应具备以下能力:①防滑能力;②上、下坡和制动能力;③自主越障能力;④防摔落能力;⑤除冰雪能力。为满足上述条件,自主设计了一种双机械臂悬挂滚轮加夹紧装置和除冰装置式移动机器人,本文主要介绍机器人的越障部分,其结构简图见图1。
2 除冰机器人的运动学分析
2.1 数学模型的建立
因机器人两臂在跨越障碍物时的动作对称,故分析机器人的运动学和动力学时,仅需分析单手臂,本文选取机器人的前臂进行分析,采用D-H法建立除冰机器人单臂跨越障碍物时的杆坐标系[4],参数见表2,杆坐标系示意图见图3。
2.2 越障动作规划
当机器人遇到障碍物时,采用仿尺蠖行走的方式跨越障碍物,除冰装置始终位于行走轮的正前方,越障的动作规划为:当前臂遇到障碍物时,前臂和后臂的下箱同时上升,直到两手臂上的线夹夹紧输电线;夹紧装置移至前臂附近,其上箱带动线夹上升,直到可夹紧输电线;前臂上箱带动行走轮及除冰装置上升,致使行走轮完全脱离输电线,线夹松开输电线,前臂顺时针旋转180°;右控制箱带动前臂相对左控制箱向前移动,直到前臂跨越障碍物,前臂顺时针旋转 180°,此时行走轮位于输电线的正上方,前臂上箱带动行走轮及除冰装置下降,直到行走轮落到输电线上,这样前臂即完成了越障作业。紧接着为后臂的越障,与前臂的越障方式对称,重复上述动作,整个机器人便可跨越障碍物。
3除冰机器人的动力学分析
3.1 无障碍段的力学
分析在输电线路中,由于架空输电线路的档距较架空线的截面尺寸大很多,且架空线多采用多股细金属线构成的绞合线,所以架空线的刚性对其悬挂空间曲线形状的影响很小。由此可假设悬挂在两基杆塔间的架空线呈悬链线形状。
3.3 动力学仿真结果分析
根据上述越障动作的规划,对前臂的越障动作进行动力学仿真,可获得所需相对大功率或扭矩部分的运动情况曲线及相应关节所需的角速度、力矩、功率与时间的曲线,分别见图4、5。由图可看出:①前臂在越障的过程中各关节的运动均是间歇且相互独立,且各时间段的运动过程始 末速度均为零,加速到匀速再到减速的过程;②开始时的力矩较大,是因刚开始为一个角速度加速且前臂下箱需带动整个控制箱体与夹紧装置上升过程,而完成此动作后力矩变小而且平缓,原因在于此关节的运动是前臂上箱带动质量不大的前臂除冰装置向上运动所需的力矩较小所致;③左箱体运动过程中由于前臂悬空时机器人产生一定的振动导致得到力矩的运动曲线不断的产生波动;④ 第一个功率波动曲线的峰值明显大于之后两个的峰值,其原因与力矩变化的原因相同。
相关知识推荐:职称论文发表的正规期刊特征
综上可知:①机器人单臂越障的时间约为55s,故机器人双臂跨越的时间约为110s。②机器人的越障动作较缓慢,故驱动各关节运动电机的功率需求不大,功率的峰值分别约为7.40、17.28W,考虑到电机减速器的影响,假设效率为0.5,则采用电机功率峰值分别为20、40 W,可满足要求。③运动时需要的扭矩较小,因此选用小型直流电机即可。④整个仿真过程很好地反映了式(5)中力与运动的关系。
4 结语
a.研制了一种新型高压输电线路除冰机器人,分析了机器人的结构,建立了机器人的数学模型,规划了机器人单臂越障的动作,建立了机器人的动力学方程,运用动力学仿真软件 ADAMS对机器人单臂跨越障碍物进行了仿真。结果表明,该机器人的设计合理、可行。
b.机器人越障时的稳定性对机器人越障质量影响较大,应尽量减少机器人越障时的振动。——论文作者:张 屹1,邵 威1,朱大林1,邹圣权2,艾福洲2,朱险峰3
参考文献:
[1] 张运楚,梁自泽,谭民.架空电力线路巡线机器人的研究综述[J].机器人,2004,26(5):467-473.
[2] 王吉岱.电力输电线路巡线机器人机械本体结构的研究[D].青岛:山东科技大学,2005.
[3] 张殿生.电力工程高压送电线路设计手册[M].北京:中国电力出版社,2003.
[4] 霍伟.机器人动力学与控制[M].北京:高等教育出版社,2005.
[5] 孟遂名,孔伟.架空输电线路设计[M].北京:中国电力出版社,2007.
[6] 董吉谔.电力金具手册(第2版)[M].北京:中国电力出版社,2001.
[7] 孙树栋.工业机器人技术基础[M].西安:西北工业大学出版社,2006.
澹版槑:鈶犳枃鐚潵鑷煡缃戙€佺淮鏅€佷竾鏂圭瓑妫€绱㈡暟鎹簱锛岃鏄庢湰鏂囩尞宸茬粡鍙戣〃瑙佸垔锛屾伃鍠滀綔鑰�.鈶″鏋滄偍鏄綔鑰呬笖涓嶆兂鏈钩鍙板睍绀烘枃鐚俊鎭�,鍙仈绯�瀛︽湳椤鹃棶浜堜互鍒犻櫎.

SCISSCIAHCI

