0
发表咨询在线!

发布时间:2021-03-25所属分类:工程师职称论文浏览:1315次
摘 要: 摘要:为模拟驾驶员的跟驰驾驶行为,并考虑驾驶员不确定性和记忆效应,基于实车跟驰实验数据,提出并训练了一种基于长短期记忆(LSTM)神经网络方法的车辆跟驰模型。基于该模型研究驾驶员的记忆效应影响时长并进行交通仿真。结果表明:与同体积隐藏层神经元的

摘要:为模拟驾驶员的跟驰驾驶行为,并考虑驾驶员不确定性和记忆效应,基于实车跟驰实验数据,提出并训练了一种基于长短期记忆(LSTM)神经网络方法的车辆跟驰模型。基于该模型研究驾驶员的记忆效应影响时长并进行交通仿真。结果表明:与同体积隐藏层神经元的前馈神经网络比较,LSTM神经网络的跟驰模型预测结果更加贴近观测值且更加平滑,接近驾驶员的实际驾驶行为;驾驶员行为受当前环境及其前1.0~3.5s内的记忆影响;该模型能够消散交通流中的扰动,模型具有较好的抗干扰能力和稳定性。
关键词:交通信息工程及控制;跟驰模型;长短期记忆神经网络;记忆效应;交通仿真
0引言
随着我国汽车保有量提高,跟驰成为城市道路工况中最重要的工况之一,据跟驰模型的形式,可以将跟驰模型的研究分为两种类型:数学分析模型和人工智能模型[1]。前者是数学式形式揭示跟驰工况中速度、车头时距、加速度等之间的关系,如GHR模型[2,3]。随着研究深入,跟驰模型引入了驾驶员偏好、注意力不集中等因素,模型复杂度提高,如考虑最大意愿加减速的Gipps模型[4]、引入期望车头时距的Helly模型[5]、考虑驾驶员感知阈值的心理-生理模型[6]和智能驾驶员模型[7],以及引入模糊逻辑的跟驰模型[8]等。以上数学分析模型通过引入少量驾驶员特性更好地模拟跟驰工况,但跟驰行为是多种特性共同作用的结果,考虑多种特性的数学分析模型非常复杂,为克服这一问题,研究者将注意力转向了人工智能模型。人工神经网络方法是人工智能模型中应用较多的方法,它能基于训练数据发挥其泛化能力反映多种驾驶员倾向,不必量化输入模型,在跟驰模型方面有基于前馈神经网络的一般状态[9]和应急疏散状态[10]的跟驰模型,以及引入特征聚类的改善神经网络跟驰模型[11]等。
除了驾驶员偏好等因素,驾驶员的记忆也会对驾驶行为产生影响,考虑记忆的驾驶行为更接近真实情况[12]。基于该思想,Xin等[13]通过引入速度记忆改进传统非线性模型,考虑车头时距记忆的跟驰模型[14,15]也被提出,Pei等[12]将记忆效应以伽马分布的形式引入线性跟驰模型并分析了其稳定性。为了将记忆效应引入跟车模型,同时保留人工智能模型在考虑驾驶员多种特性的优势,Huang等[16]采用了长短期记忆(Longshort‐termmemory,LSTM)神经网络训练跟驰模型,但该网络属于多个隐藏层的深度神经网络,网络结构复杂,目标参数较多,数据的流动逻辑不清晰。
为考虑驾驶偏好、驾驶员记忆等多种因素对跟驰的影响,本文构建了LSTM‐全连接层的神经网络结构,基于道路实车实验跟驰数据,训练出结构简洁、有记忆功能的跟驰模型,与前馈神经网络比较预测结果,基于模型研究驾驶员的记忆效应影响时长,并分析了该模型的抗干扰能力和稳定性。
1数据采集与处理
1.1数据采集
真实道路实车实验获取的跟驰驾驶数据是研究驾驶员跟驰行为的基础,本文选择了一条双向四车道高速公路,该高速公路正在扩建,其中有7km路段已完工但尚未开通,实验中可避免其他交通影响,且路段线形良好,以此作为实验场地进行跟驰驾驶。
实验中前、后两辆车上装备设备采集道路环境信息和车辆状态及驾驶员操作信息,其中摄像机采集视频以回顾实验中是否有异常状况,惯性导航系统采集两车速度和加速度,毫米波雷达采集跟驰间距,将数据整合统一为频率10Hz。实验共采集20名驾驶员的驾驶数据,其中16名男性,4名女性,均能熟练驾驶,年龄从25~50岁不等。实验中前车驾驶员按照个人习惯稳定驾驶,后车驾驶员以舒适距离跟驰并及时反馈自身是否因前车速度过低有强烈的超车冲动或因前车速度过高有跟车困难。过程中前车速度具有波动性,后车的行为除对前车当前行为变化的反馈,也包含了驾驶员偏好和记忆等因素的影响。
1.2数据处理
本文为了研究稳定的跟驰驾驶行为,排除其他因素的影响,对稳定跟驰进行了定义,并根据定义筛选数据。为使提取的数据段确实属于跟驰行为,HCM2000定义双车道公路车头时距大于5s时车辆为自由行驶状态,前车状态不会对后车产生影响,因此车头时距小于5s。为保证跟驰稳定,研究表明[17]稳定跟驰过程中两车的相对速度维持在±2m/s的范围内,因此在筛选数据时对车速差条件进行相应限制。为避免两车突然制动或加速造成两车相对运动状态的突然变化,避撞时间倒数TTCi的范围取±0.05s-1[9];为使跟驰过程自然,期间驾驶员应不存在有强烈超车冲动和跟车困难的情况。
2基于LSTM神经网络的跟驰模型
2.1LSTM块结构
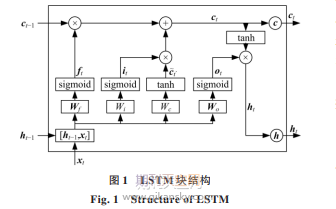
如前所述,基于LSTM神经网络的模型具有记忆功能,该功能是由网络中的LSTM块提供的,图1为LSTM块的结构图,由t-1时刻传递过来的单元状态ct-1、输出ht-1和t时刻的输入xt共同构成LSTM块的输入数据,输出数据为t时刻的单元状态ct和输出ht。LSTM共有3个门,分别是遗忘门ft、输入门it和输出门ot,其中遗忘门决定t-1时的状态单元ct-1影响ct的程度,输入门决定t时刻的输入xt保留多少进入ct,而输出门决定t时刻的状态单元ct保留多少进入输出ht,ct和ht再参与到t+1时的LSTM计算。
2.2LSTM神经网络结构
驾驶员根据前车行为调整后车姿态,以维持相对安全稳定的跟驰过程。根据公认的基本假定[18],驾驶员在跟驰中试图调节后车速度,与前车速度保持一致,GHR模型[3]则认为驾驶员还会考虑两车间距调节车速,驾驶员在跟驰过程中追求连续稳定的速度变化,避免加速度突变,因此本跟驰模型考虑了前车车速vl、后车车速vf、后车加速度af、车速差Δv和车间距d。车头时距、TTCi和前车加速度等也是在其他跟驰模型中经常考虑的参数,但实验证明这些参数无法提高本模型的效果,因此不予考虑。
相关知识推荐:哪些交通期刊审稿快
与前馈神经网络类似,LSTM神经网络也要确定隐藏层神经元个数,它表现在LSTM权重矩阵的维度,神经元个数决定了训练网络需要确定的参数数量,也与网络的联想能力有关。设置不同LSTM神经元个数,训练并测试样本,样本情况如表1所示,计算预测与观测的后车速度vf和跟车距离d均方差(MSE),得到结果见表2。
由表2可知,神经元过多或过少时测试结果均不稳定。这是由于尽管神经元较少的网络在训练时容易找到正确的收敛方向,但对不同的样本,无法保证充足的联想能力;神经元较多的网络需要训练更多的参数,在收敛过程中更容易陷入局部最小值或不收敛。为获得一个有充分联想能力的稳定模型,根据表2结果将LSTM神经网络的神经元个数设为10。
3跟驰模型结果讨论
3.1跟驰模型训练结果
选择一段稳定跟驰数据段落作为训练样本,样本长度为200,根据第2节设置的参数训练LSTM神经网络,选取一段速度范围相近的数据段作为测试样本。为了与前馈神经网络的性能对比,构建一个包含一层隐藏层的前馈神经网络,隐藏层神经元个数取10,训练方法和参数设置与LSTM神经网络相同。
样本情况如表3所示,预测结果对比如图3所示,LSTM神经网络和前馈神经网络预测结果与观测值的均方差对比如表4所示。LSTM神经网络对不同样本的预测效果有所不同,但多数情况下,LSTM神经网络的效果都好于前馈神经网络,对个别样本如编号3,前馈神经网络的速度预测结果更加接近观测值,但对距离的预测仍然不如LSTM神经网络效果好。此外,与前馈神经网络相比,LSTM神经网络的预测结果普遍更加平滑,更接近驾驶员的驾驶状态,这是记忆效应发挥作用的结果。
3.2记忆效应影响时长分析
根据2.1节对LSTM块结构与计算流程的说明可知,LSTM神经网络的记忆效应是通过单元状态ct和输出ht的传递实现的。在进行预测时,初始化c0和h0为零矩阵传递给网络,此时的预测数据记为无记忆预测值。如t=0之前有数据,c0和h0为上一时刻传递过来的非零矩阵,此时的预测数据记为有记忆预测值。
由图4可知,无记忆预测通过递归消解了零矩阵c0和h0对预测的影响,其值逐渐靠近有记忆预测值,在t=1.1s处趋于一致,因此可认为在该阶段驾驶员除了受当前环境影响,还受前1.1s内的驾驶记忆影响,即记忆效应影响时长为1.1s。对多个样本统计多个点的记忆效应影响时长(见表5)可知,记忆效应影响时长在1.0~3.5s内分布,即驾驶员在驾驶过程中的当前行为受前1.0~3.5s内的记忆影响。
3.3LSTM神经网络跟驰模型的交通仿真
由于神经网络具有复杂的非线性关系,难以进行相应的交通流稳定性分析[18],但是可以通过数值仿真来检验其抗干扰能力和稳定性。
4结束语
本文构建并训练了基于LSTM-全连接层神经网络的车辆跟驰模型,该模型具有记忆功能,与前馈神经网络相比,LSTM神经网络的跟驰模型预测结果更加贴近观测值且更接近驾驶员的实际驾驶行为。驾驶员的记忆效应影响时长约为1.0~3.5s,即驾驶员当前行为受当前环境及其前1.0~3.5s内的记忆影响。基于LSTM神经网络的跟驰模型能够消散交通流中的扰动,模型具有较好的抗干扰能力和稳定性。受实车实验数据和计算机硬件的限制,训练的模型有速度范围局限,未来应采集更大速度范围的跟驰数据训练并改进模型。——论文作者:孙倩1,郭忠印1,2
澹版槑:鈶犳枃鐚潵鑷煡缃戙€佺淮鏅€佷竾鏂圭瓑妫€绱㈡暟鎹簱锛岃鏄庢湰鏂囩尞宸茬粡鍙戣〃瑙佸垔锛屾伃鍠滀綔鑰�.鈶″鏋滄偍鏄綔鑰呬笖涓嶆兂鏈钩鍙板睍绀烘枃鐚俊鎭�,鍙仈绯�瀛︽湳椤鹃棶浜堜互鍒犻櫎.

SCISSCIAHCI

