0
发表咨询在线!

发布时间:2022-03-21所属分类:计算机职称论文浏览:1635次
摘 要: 摘 要:玉米果穗的穗长、穗粗、穗行数、行粒数等性状是制约玉米产量的重要组分性状,目前主要采用人工测量方式,或通过截取果穗横断面图像自动计算穗行数等参数,操作复杂、测量效率低、主观误差大,且无法保留完整的原始考种材料。针对上述问题,该文基于机器视觉技术

摘 要:玉米果穗的穗长、穗粗、穗行数、行粒数等性状是制约玉米产量的重要组分性状,目前主要采用人工测量方式,或通过截取果穗横断面图像自动计算穗行数等参数,操作复杂、测量效率低、主观误差大,且无法保留完整的原始考种材料。针对上述问题,该文基于机器视觉技术,通过可见光二维成像获取果穗三维表型性状参数,结合果穗颜色特征及果穗的生物学规律,分别建立投影修正模型、穗行数快速估算模型、行粒数计算模型等,精确计算穗长、穗粗、穗行数以及行粒数等性状参数。试验结果表明,该方法适用于粘连果穗处理,秃尖的识别率高,且对光照环境要求低,穗行数及行粒数的零误差率在 93%以上,测量速度可达 30 穗/min 以上,能够满足高通量考种的需求,特别是保留了原始果穗考种材料实现无损测量,对于实现高通量考种及精细化育种有重要的参考价值。
关键词:机器视觉;图像处理;无损检测;玉米;种子;穗行数;行粒数
0 引 言
考种是玉米作物遗传育种过程中一个重要的环节,考种的项目、种类繁多且涉及不同的品种,产生大量的玉米性状数据,这些性状数据需要收集、整理、记录、统计、分析、存储[1]。如何快速准确地测量玉米考种性状数据,对于提高科学选种和育种效率极为重要。
目前国内研究玉米果穗整穗无损测量方法的较少,王传宇等[2]利用全景技术将采集的旋转玉米果穗图像序列无缝拼接,对果穗全景图像进行考种指标检测,但单穗检测时间约 30 s。北京农业智能装备技术研究中心的毕昆等[4]研究了基于机器视觉的玉米考种装置,通过图像采集装置以及载物台测重装置提取玉米果穗多个考种参数,改善了目前人工考种的众多弊端;但在实现大数量样本考种测量上有着一定的局限性。吕永春等[5]则提出了一种基于背景板比例尺的玉米果穗图像特征测量方法,操作简单且易于批量测量,但是其算法没有考虑到相机成像的特点造成的图像放大及像素距离分布的非线性特性,其穗长穗粗测量测度在 96.01%左右(本文在 97%以上),且可测量的性状较少。
以北京上庄、顺义等作物育种基地为例,春播和夏播玉米每批共有 15 个试验点,每个试验点需考察 5 000 多个品种(自交系和杂交系),考种过程均由人工完成,存在如下问题:人力成本消耗大、工作效率低、精度不高、主观观测误差大、信息共享率低等问题,因此研究玉米果穗的自动无损考种方法具有重要意义。
现阶段玉米考种主要分为玉米田间测产和室内考种 2 部分,玉米的产量由于品种、栽培条件、产量水平和自然气候不同,产量因素的构成也有很大差异。因此,通过室内考种,分析研究在不同条件下的合理产量结构,争取穗大粒多粒重的品种可实现进一步促进高产。
综上所述,本文研究了一种基于机器视觉的玉米果穗产量组分性状快速无损测量方法,在保证测量精度的同时,降低了硬件设备成本,且测量速度可达每分钟 30 穗以上,完全能够满足考种的需求,对于实现高通量考种及精细化育种有重要意义。本方法包括玉米果穗图像采集、粘连果穗轮廓提取、投影修正模型、穗行数快速估算模型、行粒数快速估算模型等环节。
1 玉米果穗图像采集
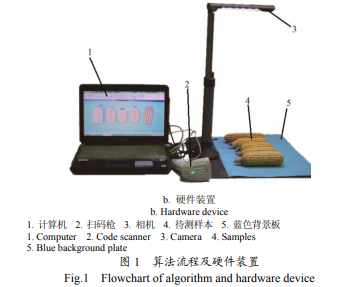
为保证算法具有良好的适应性,模拟玉米考种的实际工作环境,设置图像采集的试验环境如下:非广角 CMOS 针孔相机(便携、低成本),光线柔和的明亮场所下采集(无需特殊光源设置)。相机为 500 万像素,图像分辨率为 2942 像素(pixel)×1944 像素(pixel),拍摄高度为 55 cm,拍摄幅面为 A3 幅面。本算法测试使用的 PC 机配置为双核 1.9 GHz,2 G 内存。图像采集区为蓝色的背景板,果穗样品可任意摆放置图像采集区,算法可处理果穗粘连摆放特情况。算法流程及整体硬件装置如图 1 所示。
2 粘连果穗轮廓提取
2.1 果穗轮廓提取
玉米果穗轮廓提取的精度和速度直接影响后续三维表型性状的计算,是关键的环节。结合玉米考种的实际硬件和光照环境情况,轮廓提取需要解决阴影的干扰、相机自动白平衡和自动曝光色差等问题。
基于果穗图像的上述问题,传统的色彩通道分离算法存在局限性,无法准确提取果穗轮廓;本文采集了室内昏暗条件下、室内明亮条件下、室外阴影条件下、室外强光条件下等环境下的多幅果穗图像,以此为样本数据,计算果穗和背景之间的类间方差,并以此作为果穗轮廓分割的依据,如图 2 所示,在阴影和色差严重情况下,果穗轮廓可以准确提取出来。
2.2 粘连果穗轮廓分割
为了提高玉米果穗测量通量和速度,摆放果穗到拍摄平台时允许任意摆放、存在粘连情况。关于粘连目标分离问题有很多经典算法,本文进行了对比分析,如下:
极限腐蚀法:分割果穗速度慢,且破坏了轮廓。
闭包差集法:该算法要求目标轮廓具有凸性。玉米果穗轮廓不满足。
分水岭算法:易造成过分割。
霍夫圆估计法:只能分割类圆形目标,玉米果穗不满足。
鉴于上述情况,本文提出了一种改进的玉米果穗粘连(竖排摆放且串联粘连情况)分割算法,具体算法如下:
S1:选取最左侧果穗轮廓线的中点作为起始点,利用 freeman 链码跟踪轮廓梯度变化,并标记关键点。梯度计算采用差分法以提高速度;
S2:轮廓跟踪会产生上坡点和下坡点两类,由于分割点属于下坡点,因此只标记下坡点;
S3:针对出现的部分过分割现象,需要根据分割点和过分割点之间的邻域差异去除过分割点,采用最大似然估计法得到最小二乘意义上的分割点位置;
S4:果穗的底部分割和顶部分割方法类似,只需要交换上坡点和下坡点,并以此重新进行最大似然估计以除去过分割点;
S5:依照对应点关系(下坡点对应上坡点),切开粘连轮廓。多个粘连果穗的分割效果如图 3 所示。
3 投影修正模型
由于玉米果穗是类旋转体,依据相机成像原理,构建果穗的穗粗等参数的投影校正模型,如图 4 所示。
图 4 中 D 点为相机位置,C 点为采集图像中心位置,圆形代表果穗轮廓中间位置的截面(考种调查中穗粗被定义为果穗 1/2 位置的粗度),截面直径表示玉米果穗的实际穗粗。DB 和 DA 表示投影光线,AB 所代表的长度就是采集到图像上的穗粗(说明:图像上测得长度为经过标定当量变换的实际长度值)。因此,玉米果穗的实际穗粗为 ΔADB 的内切圆直径。
4 穗行数快速估算模型
4.1 基本思想
玉米果穗的穗行数具有以下生物学特征:玉米小穗分化期小穗裂片会分裂为 2 个小穗进而分化为 2 个小花突起,使果穗长成双行,因此玉米果穗的穗行数为偶数,且绝大多数品种的玉米穗行数的范围在 10 行到 22 行之间,果穗单面至少 5 行,具有一定的规律性。基于上述穗行数的生物学特征,本文通过单面采集果穗图像来构建穗行数快速估算模型。
在人工考种测定中,由于果穗边缘籽粒轮廓不清晰完整,且果穗单面最少 5 行,穗行数一般是通过计算果穗主三行籽粒的疏密程度来判别的;因此本文算法通过果穗图像中主三行的籽粒疏密程度来计算穗行数。通过对比分析 G 色彩通道分离、B 色彩通道分离、H 通道分离、S 通道分离、超红色彩特征提取(2R-G-B 五种方法,算法采用 G 通道分离,以果穗轮廓作为 ROI 执行 OTSU 算法,从而实现籽粒的分割,突出籽粒与缝隙间灰度值。
为了便于描述穗行数快速估算模型,如图 5 所示,定义以下术语:
中心籽粒(center grain point):就是处在无秃尖果穗区域最中心位置的籽粒。
左位点(left location point):主行左一行和左二行的分割点。左位点和右位点确定了主三行的位置。
右位点(right location point):主行右一行和右二行的分割点。左位点和右位点确定了主三行的位置。
左截点(left end point):主行左边籽粒行的边界,一般在果穗提取框内部。
右截点(right end point):主行右边籽粒行的边界,一般在果穗提取框内部。
其中,左位点和右位点代表了主三行的位置,这 2 点之间所包括的行数为 3。
4.2 位点和位截点计算
利用三线扫描法在扫描果穗主行左二行时即可获取这两行的缝隙宽度,取宽度的中心坐标即为籽粒主三行的左位点;同理可以计算得到主三行的右位点。
左截点计算方法如下:
S1:获取模板图像的旋转图像;
S2:从中心籽粒的中心点开始在旋转后的模板图像上向左扫描,直到遇到灰度值为 0 的点(黑色像素点)为止;
S3:该点的前一个点即为左截点。
右截点算法与之类似,在此不再赘述。在获取所有需要的点坐标后,需要进行逆旋转变换,将旋转后计算得到的点旋转回原图的坐标系当中。最终,对果穗籽粒的主三行识别效果如图 6 所示。
从图 6 中 2 个果穗分割结果可以看出,对于排布紧密的果穗籽粒和排布松散的籽粒,该算法均能识别出主三行的位置信息。
确定了左位点、右位点、左截点和右截点这 4 个关键点信息后,即可计算出穗行数。
4.3 位截点穗行数计算模型
穗行数计算模型采用平行投影进行计算(如图 7 所示 2 条垂直竖线),由于拍摄高度远大于穗粗,因此投影线倾斜造成的误差可忽略不计。
在图 7 中,整个圆代表果穗的横截面,其中 GH 为果穗的测量基准平面,GH 的长度表示穗粗长度;MN 表示主三行的投影长度,GM 和 NH 分别表示主三行两侧可见籽粒的投影长度,基于“果穗籽粒在整个圆周上均匀排布”的假设,可得出 3 段弧长的比即为这 3 个区域内籽粒数量的比。
相关知识推荐:计算机视觉图像处理论文怎么发表ei期刊
现在,已知 EF 代表主三行籽粒,且已知主三行的图像投影长度为 b(MN),主三行左侧半面籽粒投影长度为 a(GM),右侧为 c(NH),半径长 r=(a+b+c)/2。主三行、左侧和右侧的弧长分别记作 lb,la,lc,其对应的弦长分别记作 Sb,Sa,Sc。由圆内接直角三角形的性质可得
5 行粒数快速估算方法
行粒数快速估算的基本思想同穗行数,但扫描方向不同,具体的步骤如下:
S1:利用前面描述方法旋转果穗图像并确定中心籽粒,并记行粒数为 1;
S2:以中心籽粒为起点,沿 y 轴负方向进行三线扫描(左端点、右端点和中心点),直到扫描到下一个籽粒为止;
S3:通过轮廓跟踪算法(如虫随法)确定 S2 步骤中的籽粒轮廓信息,将行粒数自加 1,并以刚扫描到的籽粒轮廓为新的起点继续沿着 y 轴负方向进行三线扫描,直至扫描超过玉米果穗轮廓边界为止,得到 y 轴负方向籽粒数;
S4:重新以中心籽粒为起点,沿 y 轴正方向进行三线扫描,不断重复步骤 S2~S4,直至扫描超过果穗轮廓边界为止,得到 y 轴正方向籽粒数;
S5:根据 y 轴负方向籽粒数和 y 轴正方向籽粒数计算得到玉米果穗主行上的行粒数。将上述算法应用于左一行籽粒、右一行籽粒上,可得到主三行籽粒的行粒数,三者求平均即可计算得到该果穗的平均行粒数。
图 8 显示了果穗行粒数的识别效果。
6 试验与分析
6.1 穗长、穗粗测量算法精度测试
以玉米果穗的穗长和穗粗为测试对象,验证从系统标定到投影变换及任意摆放等测量方案的测量精度。试方法如下:
取自交系和杂交系各 30 穗玉米果穗样本作为测量对象;每次同时测量 5 穗玉米果穗,将果穗任意摆放在载物台上;测量完数据之后,用游标卡尺(量程 300 mm,精度 0.02 mm)分别测量这 5 穗果穗的实际穗长穗粗;另换一组(5 个)玉米果穗,重复上述步骤,直至所有果穗都测量完成为止。每穗计算误差均取绝对值,测量结果如表 1 所示。
从表 1 中可以分析得到,经过投影修正算法后穗长、穗粗的测量精度在 95%以上,平均误差小于 3%,精度满足要求。
6.2 穗行数与行粒数算法精度测试
由于玉米果穗的穗行数为偶数这个生物学特征,所以测量误差行数也为 2 的倍数。由于穗行数真值是明确的,因此测量精度不能用误差率衡量,而应该使用零误差率来衡量,即指测量准确的穗行数的样本数量占总样本数量的百分比。测试穗行数以及行粒数的测量精度试验方案如下:
在室内光照环境下,分别取 30 穗自交系果穗和 30 穗杂交系果穗,进行图像采集并测量,人工计数其穗行数和行粒数的真值;利用同样的样本,在换到室外光照环境下进行同样的图像测量与真值人工计数;将测量值与真值进行对比统计与误差分析,分析结果如表 2 所示。
分析表 2 中数据可以发现,杂交系和自交系的穗行数测量零误差率在 93%以上,行粒数的测量绝对误差在 2 粒左右,能够满足测量要求。
6.3 算法速度测试
算法速度测试采用计算机为双核 1.9 GHz,2 G 内存,集成显卡,运行平台 Windows 7,速度测试方案如下:
分别取 30 穗杂交系果穗,运用第 1 节所描述的试验系统进行测量;测量计时开始后,以 5 穗为单位进行逐 次测量,摆放无粘连,共计测量 6 次;同样取 30 穗果穗,再测试摆放粘连情况下测量用时;再取 30 穗杂交系果穗,进行上述用时测量,并最终统计分析结果,速度测试结果如表 3 所示。
分析上表 3 中数据可知,本文采用的试验系统的平均测量速度为 32.30 穗/min。而王传宇等提出的采用全景技术的玉米果穗考种指标测量方法中,测量单穗果穗的考种指标所需要消耗的时间大约为 30 s[2]。相比较而言,本文提出的方法在精度满足要求的前提下,有着较快的测量速度,对于实现大批量考种有着重要的参考价值。
7 结 论
本文以玉米果穗的秃尖率、穗行数、行粒数等产量组分性状为研究对象,针对目前手工测量方法效率低、主观误差大,且无法保留完整的原始考种材料等问题,基于可见光二维成像获取果穗三维表型性状参数,并结合果穗颜色特征及果穗的生物学规律分别建立投影修正模型、穗行数快速估算模型、行粒数计算模型,精确计算穗长、穗粗、穗行数以及行粒数等性状参数。试验结果表明,该方法适用于粘连果穗处理,且对光照环境要求低,穗行数及行粒数的零误差率在 93%以上,测量速度可达 30 穗/min 以上,对于实现高通量考种及精细化育种有重要的参考价值。
基于本文计算数据,进一步分析计算果穗的籽粒类型(马齿、硬粒型)、籽粒分布规律等精细化性状指标将是后续的研究方向。——论文作者:周金辉,马 钦※ ,朱德海,郭 浩,王 越,张晓东,李绍明,刘 哲
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

