发布时间:2020-02-24所属分类:科技论文浏览:1次
摘 要: 摘要:在进行农机的远程电子监测时,为了实现监测的实时性需要引入时间同步技术。为此,针对无线传感器网络中时间同步技术应具有高效率且节省资源的要求,给出了一种基于分簇的改进路由算法,使用时间同步有效性检查阶段的时间戳,在只发送一个小数据包的基础
摘要:在进行农机的远程电子监测时,为了实现监测的实时性需要引入时间同步技术。为此,针对无线传感器网络中时间同步技术应具有高效率且节省资源的要求,给出了一种基于分簇的改进路由算法,使用时间同步有效性检查阶段的时间戳,在只发送一个小数据包的基础上实现同步功能,从而有效降低了能源消耗,提高了同步通信的效率。为了验证方案的可行性,采用NS2仿真软件和实验的方式对同步通信能力进行了验证,结果表明:采用改进后的路由算法可以有效提高同步通信的效率,且实验结果和仿真结果基本吻合,从而验证了方案的可行性和可靠性。
关键词:无线传感网络;分簇算法;农机监控;同步通信;NS2仿真
0引言
时间同步是需要协同工作的传感器网络系统中的一个关键机制,为大多数无线传感器网络的应用所必需。由于无线传感器网络具有自组织性、多跳性、动态拓扑性和资源受限性等特点,且因受节点能量、计算能力、通信带宽及存储容量的限制,使得设计能满足不同无线传感器网络应用的时间同步技术十分重要。本研究拟将分簇无线传感网络引入到农机远程电子监测系统上,通过路由算法的优化,提高监测系统的同步通信能力,从而实时地对农机作业情况和环境参数进行监测,以提高农机的智能化和自动化水平。
1基于无线传感网络的农机远程电子监测系统
为了实现农机的远程监控,需要在农机上安装较多的设备,这些设备可以通过现场总线进行连接。现场总线CAN通信效率高,速度快,操作简单,是一种具有国际标准的现场总线。在远程电子监测时,可以将监测数据以CAN总线的形式进行传输,然后再通过无线传送设备传送到远程客户端,上位机可以实时对机车运行信息进行监测和存储,为实现田间作业机车精准作业提供了依据。
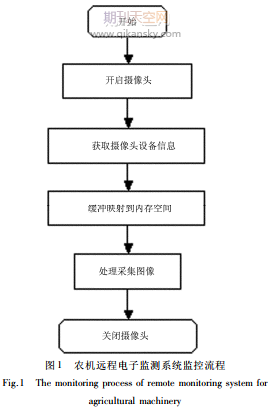
由于田间机车的设备相对来说比较复杂,还要考虑到实时性、操作的难易程度,为提高农机的作业效率,采用远程监测和控制的方式。在进行远程电子监测时,利用GPRS发布打开摄像头命令后,设备开始打开摄像头并且获取摄像头设备信息和缓冲区,通过数据处理对采集到的图像进行处理后,关闭摄像头设备,如图1所示。
农机作业时,首先利用各种传感器对环境和温度等信息进行采集,也可将实时作业情况信息传送到大屏幕上,使农机运行信息实现实时显示、自动跟踪及传输数据等,达到多农机协同一体化管理的目的。
2基于分簇结构的无线传感器网络及其路由算法
无线传感网络是一种适应性比较强的通信网络,通过传感器节点达成自组织的形式网络,可以采集、处理和传达网络覆盖范围内的各种数据信息,最后将有用的关键信息发送给观察者,框架如图2所示。无线传感网络融合了当前各种先进的技术,包括现代通信技术、微电子技术、自动化系统等,将逻辑信息和客观物体融合在一起,被广泛地应用在环境的监测和预报、农业、交通等领域。
这种无线传感网络是常用的一种类型,网络中传感器节点分为普通节点和参考节点。其中,普通节点的通信都是以参考节点开始的,通过和参考节点的距离来确定通信的层次,但其同步性较差,不利于信息的实时传递。
基于分簇算法的节点分布示意图如图4所示。在该网络结构中无线传感器节点被分为很多簇,并划分了簇首和簇节点,簇首和参考节点可以增大网络的发送功率,使其通信范围增大、网络总的跳数减少。同传统的无线传感网络相比较,距参考节点比较远的节点,其跳数也有所降低,从而降低了通信过程的同步误差,提高了网络通信的实时性。
假设有两个节点分别为x和y,实时时间为t,传感器节点x内部振荡器的实时时间为Cx(t),可以通过节点x来推算节点y的时间,从而达到同步通信的目的
实现同步通信后,可以同时对多台作业的农机进行实时监控,并将作业情况实时反馈给农机管理人员,以便管理者实现多台的协同管理,从而有效地提高农机的作业效率。
推荐阅读:农业机械硕士生毕业投的刊物都有哪些
农业机械方向的硕士生毕业都要求在核心刊物发表论文,那么这一专业的硕士生可以投稿到哪些核心刊物呢?硕士生对于刊物的选择并不了解,为此小编在这里推荐了几本农业类的核心刊物,大家在评职时可以作为参考。
3基于分簇无线传感网络的农机远程监测系统测试
当前随着农业自动化技术的不断进步,多种机型的无人驾驶设备被投放到农业作业中使用。在无人驾驶作业条件下,远程监测系统是非常重要的,而监测系统工作效率和工作质量的好坏主要取决于监测系统通信能力。基于分簇无线传感网络具有较高的无线通信能力,其通信的同步性好可以满足实时通信的需求。无人驾驶作业机械作业情况如图5所示。
无人驾驶作业一般应用在地势平坦、作业面积较大的区域,采用该种作业方式可以有效地提高农机作业的智能化和自动化水平,降低人力成本投入,提高作业效率。由于在作业过程中处于无人驾驶状态,可以采用远程监测的方式对农机进行远程控制,以提高其作业质量。本文主要对其监测系统进行设计,首先采用NS2仿真的方法对传感网络的节点通信进行验证,以得到实时通信能力较强的无线传感网络。
采用NS2对无线传感网络进行仿真的配置项目主要包括网络通信范围、节点数、通信半径、同步传输信息包大小、信号发射功率和Datarate等,配置参数如表1所示。其布置好的节点示意图如图6所示。
本次对无线传感网络的主要测试项目是同步通信能力,主要通过相同节点数需要的同步时间来测算,测算结果如图7所示。
图7中,1表示未采用分簇无线网络时的同步时间,2表示采用了分簇无线网络时的同步时间。计算结果表明:采用分簇无线网络后所需同步时间明显比没有采用的短,从而提高了无线通信的效率。
为了验证仿真的准确性,在农田里布置了传感器网络,并对其通信进行了初步的测试,如表2所示。测试结果表明:仿真和实验结果的吻合程度较高,从而验证了方案的可行性。
4结论
为了提高农机远程电子监测系统的同步通信能力、实现多农机协同监测,在农机监测无线传感网络路由算法中引入了分簇算法,提高了同步通信效率,实现了多农机监测的实时性。为了验证方案的可行性,首先搭建了100m×100m覆盖范围的无线传感网络,并利用NS2仿真软件和实验方法对路由算法的有效性进行了验证。验证结果表明:采用分簇算法后,无线传感网络的同步通信能力有了明显的提高,为农机无人化作业技术的发展提供了一种新的技术保障。
SCISSCIAHCI