0
留言稍后联系!

发布时间:2022-02-17所属分类:科技论文浏览:11217次
摘 要: 摘 要:越野环境下的无人驾驶车辆技术是近年来智能化领域重要研究方向之一,其在推动军事智能化发展、提高工农业生产效率等方面起到重要作用,具有一定的军事战略意义与民用经济价值.文中基于国内外越野场景下无人驾驶车辆技术的研究现状,从环境感知与导航定位、路 径

摘 要:越野环境下的无人驾驶车辆技术是近年来智能化领域重要研究方向之一,其在推动军事智能化发展、提高工农业生产效率等方面起到重要作用,具有一定的军事战略意义与民用经济价值.文中基于国内外越野场景下无人驾驶车辆技术的研究现状,从环境感知与导航定位、路 径 规 划、运 动 控 制3个研究层面进行归纳总结,阐 述 了越野场景下无人驾驶车辆技术中的关键技术及其技术应用存在的问题,并对未来越野环境下无人驾驶车辆技术的研究方向和研究重点进行了展望.
关键词:无人驾驶;越野环境;环境感知与导航定位;路径规划;运动控制
无人驾驶车辆又可称作无人地面车辆 (un-mannedgroundvehicle,UGV),多指通过感知、定位、规划与控制等功能模块实现与环境交互并自主行驶的地面移动机器平台.无人驾驶车辆作为智能交通系统的主要载体,主要应用场景包含了城市环境与越野环境,其中针对越野环境无人驾驶技术的研究在军事[1]、工农业等[2]方面具有广泛的应用前景.
不同于城市环境,越野环境不具备结构化道路及交通规则信息,且环境中障碍物复杂多变,地形起伏大,使得无人驾驶技术的发展在各方面都受到挑战.在感知方面,由于越野环境信息繁杂且干扰较多,不利于提取环境特征实现环境建模.在 路 径 规划方面,动态复杂环境中较高的环境信息不确定性增大了路径规 划 实 现 难 度.在运动控制方面,由 于无人驾驶车辆是一个具有复杂非完整性约束的非线性耦合系统,其与地面间复杂的相互作用使得车辆与地面的接触模型不易建立,同时复杂越野地形也对运动控制算法的鲁棒性和实时性提出更高要求.
致力于克服以上困难,针对越野场景下的无人驾驶技术开展了一系列研究.20世纪90年代,美国国防高级研究计划局(DAPPA)开展了 DEMO 系列的无人车 研 制[3].2004年 后,DAPPA 组 织 了 一 系列无人车技术比赛,这些赛事吸引了大批科研机构及企业的参与,推 动 了 无 人 驾 驶 技 术 的 发 展.我 国在无人驾驶领域起步较晚,早期针对越野场景的军用地面无人平台研究主要有“八五”,“九五”期间开展的“军用地面机器人 ATB”项目;国家自然科学基金委组织并举办的“中国智能车未来挑战赛”[4]也促进了无人驾驶技术在越野环境下的研究;2014年开始由陆军装备部开展“跨越险阻”系列比赛,着重解决无人驾驶车辆在越野环境下的难点问题,为无人驾驶车辆适应复杂越野工况奠定了基础.
文中侧重于从环境感知与导航定位、路径规划、运动控制3个层面阐述国内外在越野环境下无人驾驶技术的相关研究.
1 环境感知与导航定位
环境感知系统是无人驾驶车辆中最为重要的部分之一,其通过分析各种传感器采集的特征信息最终实现车辆周围环境模型的建立、车辆位置信息的获取以及车 辆 行 驶 状 态 的 估 计,为 后 续 的 决 策、规划、控制模块的 实 现 提 供 了 关 键 信 息.这 里 所 讨 论的环境感知系统的技术主要包括外部环境感知技术与导航定位技术两部分
.1.1 环境感知技术
外部环境感知系统所使用的传感器主要包括三维激光雷达、毫米波雷达、立体相机、红外相机、超声波传感器等.感知系统运用这些传感器可在无人驾驶车辆中实现障碍物检测、可通行区域分析、目标检测与跟踪等功能.
越野环境存在环境特征不易提取、路面状况复杂多变等特点,因此越野环境下的感知技术多聚焦于地面拟合与分类、正负障碍识别、路面通过性分析等方面.地面拟 合 多 用 于 获 取 地 面 状 态,为 无 人 车辆行驶提供可通行区域分析,因此该功能实现多采用能精确获取环境三维信息的激光雷达.目前基于激光雷达的越野环境下地面分割方法主要有:基于数据驱动的方法,将人工提取的点云特征用于算法训练以构建地面模型[5];基于概率图模型的方法,如采用马尔可夫随 机 场 (Markov random field,MRF)[6]结合点云扫描特性的方法来获取精确的地面点云分割结果.路面属性的分类用于获取路面粗糙度等信息,有助于车辆行驶的稳定控制,其需要环境中稠密的纹理特征信息及颜色信息,因此多采用相机实现此 功 能.丁 泽 亮 等[7]构建了越野环境下的图像数 据 集,并将场景识别与基于图 像的路面语义分割 融 合,提高了路面提取算法对 于越野环境的适应性 与 准 确 性.MEI等[8]则 采 用 推 理 与 学习模型实现基于视觉的道路检测,以 适 应 越 野 地形的多样性.对于越野环境中正负障碍的区分,正障碍一般指在地面以上的物体,负 障 碍 则 包 含 凹坑、水体等在地面或以下对车辆行驶有 较大影响的部分,如图1所 示.相 较 于 正 障 碍,负 障 碍 的 检测更具挑战性.基 于 激 光 雷 达 的 负 障 碍 检 测 方 法大多是先对激光雷达扫描特征信息进 行提取,再对提取的特征使用分类器分类[9]、数 据 聚 类[10]等方式进行处理以获得最终检测结果.CHEN 等[11]则基于双目相机的 U-V 视差原理提出一 种 激 光 成像视差图的方法,实 现 了 正 障 碍、凹 坑 和 水 面 的 统一检测.
尽管单一传感器在越野环境下的感知领域取得了诸多进展,但受限于传感器的工作原理,有时无法满足复杂越野环境下的感知需求.因此,能够提供稳定、丰富的感知信息的多传感器融合方法既是当前的研究热点,也是今后的发展方向[12].MILELLA 等[13]将毫米波雷达与相机融合,提取各传感器特征进行融合并构建了一种自监督训练的路面分类器,该算法减少了人工标注训练数据的时间,并且提高了算法的环境适应性.REINA 等[14]则将毫米波雷达对2D物体的检测结果与双目视觉对物体的分类特征相结合实现了一种用于农业场景下的3D目标检测方法.
1.2 导航定位技术
导航定位技术能够实时对无人驾驶车辆进行位姿与速度估计,获取车辆的相对与绝对的位置信息,为控制模块更好地控制车辆的运动提供准确的状态估计.无人驾驶车辆的导航定位技术主要包括全球导 航 卫 星 系 统 (globalnavigationsatellitesystem,GNSS)与 惯 性 导 航 系 统(inertialnavigationsystem,INS)组合的定位技术,利用感知传感器实现的里程计与同时定位与建图(simultaneouslocalizationandmap-ping,SLAM)技术,以及多种定位技术融合的方案.
GNSS与INS可 以 通 过 多 种 融 合 方 法[15]实 现组合导航,以弥补二者自身在定位方面的不足,实现车辆的长时间准确定位,目前已经广泛应用于无人驾驶车辆中.但是组合导航在面对 GNSS出现长时间丢失数据的情况时,定位结果仍会产生较大的偏差.因此,利用车辆自身运动信息及环境变化信息进行车辆自定位的里程计的应用在无人驾驶车辆精确定位方面具有较大的帮助.传统里程计主要为轮式里程计,但 由 于 越 野 环 境 下 地 形 复 杂,车 轮 易 滑转,不利于轮式里程计的定位,所以其多与其他定位传感器融 合 以 提 高 航 位 推 算 的 精 度[16].利 用 感 知传感器实 现 的 里 程 计 主 要 包 括 视 觉 里 程 计(visualodometry,VO)与激光雷达里程计两种.对于 VO,其成本较低,且相对位置估计较为准确,因此被广泛应用与研究.YI等[17]就提出一种基于多 相 机 协 作的全景视觉与立体感知方案用于提取越野环境特征,以降低视觉里程计在越野环境下受光照、遮挡、地形崎岖等不利因素的影响,提高视觉里程计的适应性与鲁棒性.相较于 VO,受益于激光雷达的量测原理,激光雷达里程计具有不受光照影响,相对位置估计精确的特点.FU 等[18]提出一种将相关扫描匹配与局部匹配融合的两阶段点云配准算法,提高了越野环境下激光雷达点云配准的性能,有利于提高激光雷达里程计的定位精度.SLAM 通过传 感 器 的 探 测 信 息 建 立 环 境 地 图并使用该地图实现实时定位,能够解决里程计在位置估计时 存 在 较 大 累 计 误 差 的 问 题.由 于 SLAM在缺少 GPS或 GPS信号弱的环境下对车辆进行长时间定位具有一定的优势,因此其在越野环境下具有较大的发展潜力.刘忠泽等[19]针对大尺度范围的越野场景,提出以一种具有拓扑层次的三维体素子地图的方式构建环境地图,利用特征匹配进行闭环检测,使用IMU 对车辆全局位姿进行优化,实现了野外实时环境地图的创建与精确定位.俞毓锋等[20]则采用视觉与激光雷达融合定位的方式,将定位看作图像与激光雷达间特征关联的最小化重投影误差问题,减小了SLAM 算法在越野环境下特征误检测、特征遮挡以及误匹配对定位的影响.此外,深度学习方法也逐渐应用于 SLAM 中,借助深度学习在特征提取方面的优势,不少算法都取得了较好的结果[21].
2 路径规划
路径规划是无人驾驶车辆实现智能化的关键技术,其能够基于环境感知与导航定位,在给定起始点和目标点后,按照性能指标规划出一条无碰撞,可跟踪的路径.在越 野 环 境 下,路径规划面临着环境复杂度与不确定性增加的挑战.这就需要路径规划模块在规划路径时纳入更严格的环境约束,不仅要考虑所选路径的耗时、距离等条件因素,还应当考虑路径的平顺性以 及 越 野 路 面 的 特 性.在 技 术 层 面,路径规划可以大致分为基于图形搜索的方法、基于随机采样的方法和基于优化理论的路径规划方法.
2.1 基于搜索的路径规划算法
基于图搜索的路径规划算法主要是利用栅格地图对环境进行映射,将环境信息以概率或其他形式赋值给每个网格,此后在整个栅格图中搜寻初始位置到目标位置的全局最佳路径.
传统搜索算法在动态多变的越野环境下难以运用,TENIENTE等[22]便提出一种 HRA*算法,采用一种混合节点扩展技术,将满足车辆运动学约束的空间随机搜索技术与仅考虑到达目标地的运动学可行路径的成本度量相结合,提高了复杂环境下的路径规划效率与鲁棒性.此外,越野环境地形复杂、路点稀疏,路径 规 划 仅 通 过 单 路 点 规 划 易 出 现 错 误,因 此PETEREIT等[23]在混合 A*算法基础上添加了多路点规划、车辆动力学约束、路面特征分析等方法,以实现复杂环境中近似最优的路线的规划.同时,基于搜索的方法在大场景下的路径规划时效性也是重要研究方向之一,AMMAR等[24]提出时间松弛版的 Dijk-stra与 A*算法,通过栅格地图结构实现最佳路径的近似,并达到了时效与精度的平衡.此外,针对环境模型表征的改善也能够提高基于搜索路径规划的精度与时效性,GRAF等[25]通过构建一种基于图的、层次的、多分辨率的地形模型来精确表征环境,并采用多种优化手段降低路径搜索空间,加快算法收敛,最终可以在越野环境下实现快速局部路径规划.
尽管搜索算法在一些场景中有较好的表现,但该方法也具有一定的局限性.搜索算法的增量性质导致其计算复杂度较高,不适用于车辆高速行驶或动态障碍物分布较密场景下的路径规划,且搜索算法多基于二维栅格图,不能较好地解决高维空间下的路径规划问题,因此多数应用搜索算法实现越野环境下路径规划的研究多注重于解决这两个问题.
2.2 基于采样的路径规划算法
基于采样的路径规划方法主要是通过在规划空间内随机采样的方式来探求空间上的连通性,其不依赖于精确的空间建模和状态之间的连接,适用于地形复杂、高维且不易建立精确地图的越野环境.
较为经典的基于采样的路径规划方法如概率路径图(probabilisticroadmaps,PRM)[26]与快速 扩 展随机树(rapidly-exploringrandomtrees,RRT)[27],这两种方法及其变种已广泛应用于无人驾驶路径规划[28].LEE等[29]将基于采样的机会约束 RRT*算法与线性二次高斯运动规划(LQG-MP)算法结合,实现了在可变形的高滑地形下稳定可靠的路径规划.JI等[30]则将地形信息与车辆特征结合构建包含6自由度元素的构形空间,并在构形空间中运用采样算法实现车辆在大范围越野环境的下的运动规划.在实际 应 用 中,采样算法的时效性至关重要,HIDALGO 等[31]提出 了 一 种 运 用 GPU 加 速 RRT处理大型二维地图的算法,通过同时计算四颗树的方式来提升处理速度,并降低靠近障碍物的节点的拓展概率来减少碰撞检测对算法效率的影响,以加快路径规划速 度.此 外,采 样 方 法 的 使 用 需 要 有 较好的采样 规 则 与 指 导 启 发,YANG 等[32]在 其 无 人平台的局部路径规划中通过对包含空间高阶信息且平滑的参考路径进行分段状态采样,最终能够标识出一条无碰撞、运动学可行且曲率连续的路径.
2.3 基于优化的路径规划算法
智能优化算法一般是受自然生物规律或者物理现象的 启 示 而 设 计 出 的 随 机 搜 索 算 法,如 蚁 群 算法[33]、遗传算法[34]等.蚁群算法是较为典型的智能优化算法之一,具有易并行计算、鲁棒性强等优点.但蚁群算法在越野环境的苛刻约束条件下应用存在计算量较大,容易陷入局部最优解的问题.针 对 越野环境下蚁群算法应用的缺点,一些学者提出了改进方法.对于越野环境涉及大量坡道且路面粗糙度不一的情况,为保证规划路径的可跟踪性,需对道路特征进行处理,吴天羿等[35]通过与路面坡度和粗糙度约束结合的蚁群算法估计函数实现路径最优化.对于越野环境中存在点位多、分布散等状况,王书勤等[36]建立了混合整数规划模型,提出了一种混合蚁群算法,利用选择、交叉和变异算子对解进行优化.
基于最优化的路径规划则主要是考虑车辆的非线性系统,本 质 是 求 解 带 约 束 的 最 优 化 问 题.HU等[37]就引入障碍物与地形的势场函数模型,将路径规划问题转化为求解车辆最优控制问题,并把势场梯度纳入目标函数中,最终通过仿真越野环境测试了该多阶段路 径 规 划 算 法 的 有 效 性.此 外,基 于 离散优化的方法也在无人驾驶路径规划领域有较为成功的应用[38].
3 运动控制
轨迹跟踪控制技术是无人驾驶车辆实现自动控制最重要的部分之一,特别是在复杂环境下高精度轨迹跟踪是保证无人驾驶车辆行驶安全和完成相关任务的基础.但 是,轨迹跟踪控制在复杂环境下的应用面临诸多挑战:首先,车辆是一个包含复杂非完整性约束的非线性耦合系统,容易受到系统不确定性和外界干扰 等 不 利 因 素 的 影 响.其 次,无 人 驾 驶车辆的运动控制受到行驶道路的环境约束以及执行机构的饱和约 束.最 后,无人驾驶车辆高精度的运动控制需要充分考虑建模误差、参数扰动等系统不确定性以及外 部 干 扰 的 影 响.故 在 研 究 中,通 常 将运动控制的 横 向 和 纵 向 进 行 解 耦,分 别 实 现[39],常用的无人驾驶车辆运动控制方法主要包括非模型类的运动控制方法和模型类运动控制方法.
3.1 非模型的控制方法
PID (proportional-integral-derivative)控制是非模型控制方法中一种适用性广、鲁棒性好的控制方法.无人驾驶领域中常结合PI来实现车辆的纵向运动控制,结合PD来实现车辆的横向运动控制.在越野环境中实现车辆运动控制的首要问题是道路场景复杂多变易导致控制执行效果不稳定,这便可以使用 PID算法来实现初步控制,并针对不同任务做出调整,以满足不同的场景需求并提高控制的稳定性.龙智卓等[40]采用模糊PID控制转向角输出与增量式 PID控制车辆液压转向系统的串级式方法,实现了地下矿用无人车辆的行驶控制.OZANA 等[41]提出了一种全局优化方法来设计PID控制器的方案,通过设计目标函数各部分的权重系数以解决不同需求条件之间的冲突,并通过仿真测试表明该种设计方法提高了 PID在实际使用时的适应性.PID控制算法虽然简单且容易实现,但算法参数受较多因素影响,且敏感度较高,当被控制的执行器参数不稳定或反应滞后时,PID的控制效果会有所下降.同时,该算法只能保证闭环系统的部分零极点的控制效果.
前馈-反馈控制 算 法 也 是 非 模 型 控 制 算 法 的 一种.其中的前馈控制是为了减小甚至消除路径曲率变化带来的干扰,反馈控制是根据车辆在控制系统作用后的状态 来 进 行 调 整,以 改 进 系 统 的 输 入.车辆在越野环境中行驶时会受到环境的多种干扰,这对车辆运动控制的实时性以及反馈信号的处理质量提出更高要 求.郑 伟 勇 等[42]提出了一种采用前馈-反馈控制算法的方案,该方案通过前馈控制提高系统的实时性,在反馈控制中结合模糊逻辑思路,用以排除 外 界 干 扰,提 升 系 统 建 模 的 效 果.蔡 英 凤等[43]针对复杂工况下车辆横向控制精度较低、稳定性较差的问题提出了一种可拓优度评价的横向轨迹控制器,该控制器包含两层结构,其中上层控制器结构包含了一种 PID前馈-反馈控制器,该控制器在两 次变道工况的仿真测试中能够使车辆控制系统在小转弯半径、道路曲率较大的工况下实现快速响应.
3.2 基于模型的控制方法
模型预测控制(modelpredictivecontrol,MPC)是一类算法的统称,该类算法在每个控制周期,使用车辆的非线性动力学模型预测车辆在未来一段时间的状态,通过计算有限时间跨度的最优化控制问题,获得可利用 的 控 制 序 列,最 终 达 到 最 优 控 制 效 果.模型预测控制这类算法适用于运动模型较复杂的控制系统,如在粗糙土路、冰雪路面等复杂场景下行驶的车辆的控制系统.由于 MPC 方法可考虑车辆运动学约束和动力学约束,故对越野环境的无人驾驶的运动控制问题具有突出的优势.
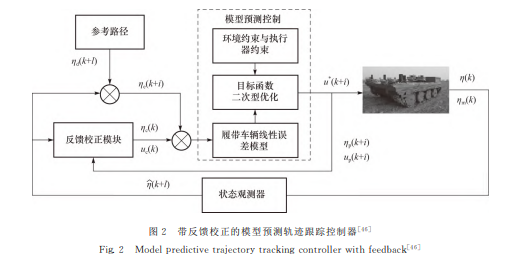
在越野环境中,基于模型的控制算法需要克服道路场景复杂多变、外部干扰多、建立车辆模型难度较大等问题,但当前大多基于模型的控制算法主要考虑车辆的运动学约束,极少引入动力学约束,整体方法的处理复杂度较低,并不完全适用于越野环境.在此基础上,SCHILDBACH 等[44]将随机约束纳入考虑,计算不满足随机约束的平均时间概率,同时结合了有限时间跨度中的最优控制问题的多阶段结构,为越野场景下模 型复杂化提供了基础.刘 凯等[45]考虑复杂 道 路 下 车 辆 侧 倾 对 车 辆 跟 踪 控 制 的影响,建立考虑车辆侧倾角的动力学模型,并添加侧倾安全约束,最终构成的控制器通过仿真测试表明可以提高车辆跟踪控制的精度.部分学者则通过完善越野场景下的车辆模型实现车辆的精确控制.胡等[46]通过在模型预测控制跟踪器里引入反馈校正,系统地表征模型的不精确性,并通过实车测试表明了该方 法 可 以 提 高 路 径 跟 踪 精 度,如 图 2 所 示.
ZHAO 等[47]则通过估计滑转滑移率 来 完 善 越 野 场景下车辆模型,以进行准确的路径跟踪.
4 结束语
无人驾驶技术面临着前所未有的挑战和机遇,在近十几年取得了长足的发展.针对越野场景的无人驾驶技术研究也取得了较大的进展,为无人驾驶技术在军事、工业(如矿场)、农业(如农场)的应用打下坚实的 基 础.文中就越野场景下的无人驾驶技术,从环境感知与导航定位、路径规划、运 动 控 制3个层面做了文献调研及总结,阐述其针对越野场景的关键技术及优势劣势.未来无人驾驶车辆在越野场景下的研究注意包括以下部分:
① 感知系统中深度学习的应用是今后发展的主要方向之一,但深度学习是一种数据驱动类方法,需要大量数据训练以进行特征学习,目前开源的大多数数据集[48]都是基于城市等结构化环境,使得深度学习在越野环境中的应用存在一定的难度.因此今后构建较为典型的开源越野环境数据集尤为重要.
② 越野场景的复杂地形不再是城市环境中的平面.这对路径规划提出更高的要求,故路径规划需对精确的车辆模型及环境信息需进行综合考虑,在满足车辆动力学约束的前提下提高路径规划效率.
③ 越野场景对车辆的模型精确度要求更高,越野场景下需要将车辆的侧倾和俯仰等自由度纳入运动控制模型中,以保证在不平路面的安全行驶.
④ 环境感知、路径规划以及运动控制3方面的协调研究,保证各方面能协调互补,整个系统有序运行.——论文作者:胡宇辉, 王旭, 胡家铭, 龚建伟, 王克, 李桂鹏, 梅程
参考文献:
[1]陈慧 岩,张 玉.军用地面无人机动平台技术发展综述[J].兵工学报,2014,35(10):1696-1706.CHEN Huiyan,ZHANG Yu.Anoverviewofresearchonmilitaryunmannedgroundvehicles[J].ActaArma-mentarii,2014,35(10):1696-1706.(inChinese)
[2]谭元杰,李宏鹏,王艳花,等.无人驾驶农业车辆技术的研究与应用[J].农业技术与装备,2020(10):22-23,25.TAN Yuanjie,LIHongpeng,WANG Yanhua,etal.Studyandapplicationofunmannedagriculturalvehiclesys-tem[J].AgriculturalTechnology & Equipment,2020(10):22-23,25.(inChinese)
[3]SEETHARAMANG,LAKHOTIA A,BLASCH EP.Unmanned vehiclescomeofage:the DARPA grandchallenge[J].Computer,2006,39(12):26-29.
[4]孙扬,陈慧岩.无人地面车辆测评体系研究[J].兵 工 学报,2015,36(6):978-986.SUN Yang,CHEN Huiyan.Researchontestandevalu-ationofunmannedgroundvehicles[J].ActaArmamenta-rii,2015,36(6):978-986.(inChinese)
[5]CHENTongtong,DAIBin,WANGRuili,etal.Gauss-ian-process-basedreal-timegroundsegmentationforau-tonomouslandvehicles[J].JournalofIntelligentandRo-boticSystems,2014,76(3-4):563-582.
[6]张名芳,付 锐,郭 应 时,等.基于三维不规则点云的地面分割算法[J].吉林大学学报(工 学 版),2017,47(5):1387-1394.ZHANG Mingfang,FU Rui,GUO Yingshi,etal.Roadsegmentationmethodbasedonirregularthreedimensionalpointcloud[J].JournalofJilinUniversity(EngineeringandTechnologyEdition),2017,47(5):1387-1394.(inChi-nese)
[7]丁泽亮,胡 宇 辉,龚 建 伟,等.基于深度学习的自适应场景路面 提 取 方 法[J].北京理工大学学报,2019,39(11):1133-1137.DINGZelian,HUYuhui,GONGJianwei,etal.Adaptiveroadextractionmethodindifferentscenebasedondeeplearning[J].TransactionsofBeijingInstituteofTechnol-ogy,2019,39(11):1133-1137.(inChinese)
[8]MEIJilin,YU Yufeng,ZHAO Huijing,etal.Scene-a-daptiveoff-roaddetectionusingamonocularcamera[J].IEEE TransactionsonIntelligent Transportation Sys-tems,2018,19(1):242-253.
[9]赵一兵,郭 烈,李 明 丽,等.无人地面车辆野外水体障碍物识别[J].兵工学报,2014,35(Suppl.1):64-69.ZHAOYibing,GUOLie,LIMingli,etal.Waterhaz-ardrecognitionforUGVinoff-roadenvironment[J].ActaArmamentarii,2014,35(Suppl.1):64-69.(inChinese)
[10]蔡云飞,石庭敏,唐振民.基于双多线激光雷达的非结构化环 境 负 障 碍 感 知 技 术 [J].自 动 化 学 报,2018,44(3):569-576.CAIYunfei,SHITingmin,TANGZhenmin.Negativeobstacleperceptioninunstructuredenvironmentwithdoublemulti-beamlidar[J].Acta AutomaticaSinica,2018,44(3):569-576.(inChinese)
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

