0
发表咨询在线!

发布时间:2022-02-25所属分类:科技论文浏览:1607次
摘 要: 摘要 :在分析高压输电线路巡检工作的特点和国内外高压输电线路巡线机器人的发展现状和发展趋势的基础上, 结合高压输电线路上覆冰的去除方法, 主要介绍了设计的一种新型的高压输电线路除冰机器人.该机器人结构简单, 可以在输电线上稳定地行走, 能够较好地解决自主越障的

摘要 :在分析高压输电线路巡检工作的特点和国内外高压输电线路巡线机器人的发展现状和发展趋势的基础上, 结合高压输电线路上覆冰的去除方法, 主要介绍了设计的一种新型的高压输电线路除冰机器人.该机器人结构简单, 可以在输电线上稳定地行走, 能够较好地解决自主越障的问题, 完成输电线上的除冰任务, 具有广泛的应用前景.
关键词:除冰机器人; 输电线路 ; 越障; 除冰
随着我国经济的高速发展, 超高压大容量输电线路越建越多, 线路走廊穿越的地理环境更加复杂, 如经过大面积的水库、湖泊和崇山峻岭, 给线路维护带来很多困难 .而且在严冬及初春季节, 我国云贵高原、川陕一带及两湖地区常出现雾凇和雨凇现象, 造成架空输电线路覆冰, 使线路舞动 、闪络 、烧伤, 甚至断线倒杆, 使电网结构遭到破坏, 安全运行受到严重威胁. 在紧急情况下, 寻道员用带电操作杆或其它类似的绝缘棒只能为很少的一部分覆冰线路除冰, 人工除冰有很高的危险性 [ 1] .
在国外, 一些国家的地理与气候情况与我国相似, 甚至一些国家的情况更加恶劣, 为了保证电力系统的可靠性, 提高高压输电线除冰的效率, 减少损失, 维护工人的安全, 开发一种可以替代或部分替代工人进行除冰作业的新型设备一直是国内外相关研究的热点 .因此, 研制安全有效的除冰机械以代替人进行导线除冰具有较好的应用前景和实用意义 .文章提出的除冰机器人即为一种既安全又有效的除冰装置 .
1 高压输电线路除冰机器人的机构介绍
机器人是一个复杂的机电一体化系统, 涉及到机械结构、自动控制 、通信 、传感器信息融合、电源技术等多个领域.但机械结构是整个系统的基础, 也是目前制约机器人实用化的最大障碍 .针对这种情况设计了一种新型的实用的高压输电线路除冰机器人, 它具有以下一些功能:( 1) 能在输电线上以预想的速度进行平稳爬行;( 2) 具有一定的爬坡能力;( 3) 能够跨越输电线上的防震锤, 线夹, 绝缘子等障碍物;( 4) 能够除去输电线上的冰雪.
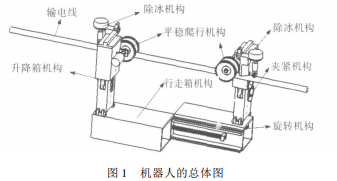
机器人的参数如下:机器人的体积为 600 mm × 328 mm ×526 mm( 长 ×宽 ×高) ;重量约为 15 kg ;平稳爬行的速度约为 375 m/h .机器人的机械结构主要包括平稳爬行机构、越障机构和除冰机构, 其总体图如图 1 所示.
1 .1 平稳爬行机构的设计
为了使机器人的前行速度达到最快, 且前行平稳, 此机器人采用行走轮式机构, 如图 1 中的平稳爬行机构.
1 .2 越障机构的设计
机器人的越障机构主要由行走箱机构、升降箱机构、夹紧机构和旋转机构组成 .
( 1) 行走箱机构.机器人行走箱机构行走方式的构思来自蠕虫的行走方式 .其主要由左、右行走箱机构以及行走螺杆和螺母组成, 如图 2 所示.
( 2) 升降箱机构 [ 2] .机器人的升降方式也采用螺杆驱动机构升降的方式.升降箱机构的主要组成为上箱机构和下箱机构以及升降螺杆和螺母组成, 如图 3 所示 .
( 3) 夹紧机构[ 3] .夹紧机构的夹紧夹图如图 4 所示, 1 为滑槽, 升降机构上箱上的伸出轴便在其中滑动, 2 为轴孔, 升降箱下箱机构的伸出轴便从中穿入, 而轴便带动夹紧夹在升降箱上箱机构的槽中上下滑动, 从而带动夹紧夹顺 、逆时针旋转, 3 为半圆形槽, 当夹紧夹到达死点位置时, 便夹紧导线 .夹紧夹的作用是夹紧导线, 其运动方式的简图如图 6 和图 7 所示.夹紧夹的松开状态如图 5 所示, 夹紧夹的夹紧状态如图 6 所示 .夹紧夹将导线夹紧, 便可保证机器人在越障时不会发生径向和轴向侧翻.
( 4) 旋转机构 .旋转机构采用的是一对齿轮的传动, 齿轮安装在行走箱机构的行走箱内, 如图 7 所示. 1 为大齿轮, 以键连接的方式与 2 相连, 2 为箱座与升降机构的连接, 它的作用是将升降机构和箱座连接, 3 为小齿轮, 它靠驱动电机 4 驱动, 4 为小齿轮的驱动电机, 5 为螺母, 6 为插销, 5 和 6 的作用是托住行走箱.当小齿轮旋转时, 带动大齿轮的旋转, 而大齿轮则通过 2 带动升降箱机构与除冰机构的旋转 .
1 .3 除冰机构的设计
目前国内外已经研究出许多种除冰的方法[ 4] , 但是有许多在目前都只是提出, 并没有实现.所设计的高压输电线路除冰机器人是在对巡线机器人作设计的基础上添加除冰装置, 既可以巡线也可以除冰, 结构比较简单, 而且效率比较高.所设计的除冰机构分为两个部分, 即铣刀部分与楔形块部分 .先利用铣刀 1 从覆冰的中间铣出一条裂缝, 覆冰的其它部分便会裂开, 其后的楔形块 4 再对覆冰进行挤压, 覆冰便会被挤压掉, 导线的除冰便完成 .如图 8 所示.
机器人跨越悬垂绝缘子等障碍物时一只手臂悬空, 另一只手臂越过绝缘子, 而此时障碍物另一侧导线上的覆冰未清除, 轮子和铣刀处于一个平面上面, 这样就会造成轮子无法在电线上落脚的情况.基于这种情况的考虑, 提出了第 2 套除冰方案 .具体示意图如图 9 所示, 采用 2 个铣刀, 其中铣刀中心线和导线中心线垂直, 在无障碍物时和上面的除冰装置类似, 铣刀电机驱动铣刀旋转除导线两侧面的覆冰, 后面的楔形块在机器向前行走的推力作用下可以破碎铣刀未清除的覆冰.当遇到悬垂线夹这样的障碍物时, 首先还是行走电机停机, 然后启动驱动螺杆运动的电机, 使电极正转, 在螺杆转动下带动与螺母相连的楔形块以及前面的铣刀一起向前推进, 直到将通过悬垂线夹并且将线夹前面的覆冰除掉, 直到当一只手臂越障后轮子可以落到导线上面为止 .当除完该段覆冰后, 螺杆电机反转将刚前进的装置收回, 然后再进行如上述的越障动作.
2 高压输电线路除冰机器人的运动过程
此机器人采用双臂结构, 这样可以满足其在行走时的稳定性, 并且在双臂的配合下可以完成相应的姿态调整以完成各种障碍的跨越和除冰[ 5] .机器人的整体机构的三维图如图 10 所示, 由于此机器人的驱动靠的是电机的驱动, 因此叙述其运动过程将以电机为线路对整体机构的运动过程作阐述
为了使运动过程分析起来简单, 下面将采用机器人的结构简图作分析, 机器人的结构简图如图 11 所示.由于两边机构基本对称, 故下面简图只对一边作了运动方式的标注 .
而若要完成基本的行走运动 、相应的障碍跨越和除冰, 那么机器人将要有以下基本的运动形式来互相配合完成基本的行走运动、相应的障碍跨越和除冰. ( 1) 行走运动 .双臂依靠 8 和 9 前后行走轮, 可以在输电上行走, 来完成除冰的任务 .( 2) 旋转运动 .升降箱机构和除冰机构的整体旋转可以依靠 3 和 14 各自的齿轮组旋转来完成.在此机器人中, 只需要旋转 180° 即可 .( 3) 升降运动.机器人的升降可以依靠 4 和 13 中各自的螺杆和螺母的相对运动来完成 .( 4) 夹紧运动.夹紧运动不需要电机的驱动来完成, 上面已介绍过当 4 和 13 升降机构进行升降运动时会带动夹紧夹夹紧或松开输电线 .( 5) 移行运动 .当除冰机构采用的是图 9 的除冰机构时, 铣刀的伸出与缩回运动需要依靠 7 和 10 的螺杆与螺母的相对运动来完成 .
由于在输电线上存在多种障碍物, 故只对其中一种典型的障碍物防震锤作跨越演示, 具体步骤如下.
第 1 步:当前臂接近防震锤时, 电机 1, 2 停止, 行走轮 8 和 9 停止前进, 电机 5 和 6 打开, 前后臂的升降螺杆顺时针旋转, 带动升降箱下箱和行走箱一起上升, 夹紧夹 5 顺时针旋转和夹紧夹 12 逆时针旋转, 当俩夹紧夹夹紧输电线时, 电机 5 和 6 关闭.采用第 2 套除冰机构, 打开除冰机构的驱动电机, 通过冰刀在伸出和缩回的过程中, 将防震锤后方输电线上的一段冰除去, 以便前臂的行走轮 8 安放 .如图 12 所示.
第 2 步:前臂的电机 5 打开, 前臂的升降螺杆顺时针旋转, 由于后臂的夹紧夹 12 已将输电线夹紧, 前臂中固定在上箱中的螺母向上运动, 螺母带动上箱和除冰机构、行走轮向上运动, 此时夹紧夹 5 顺时针旋转, 当夹紧夹夹紧输电线时, 此时将电机 5 关闭 .打开前臂旋转机构的小齿轮驱动电机 7, 小齿轮带动大齿轮旋转, 当大齿轮逆时针旋转 180°后, 关闭电机 7 .打开行走箱行走螺杆的驱动电机 9, 由于后臂的夹紧夹 12 将输电线夹紧, 故前臂便在行走螺杆和螺母的相对移动下前进, 当移动到防震锤后方的不远处, 关闭电机 9 .如图 13 所示.
第 3 步 :打开前臂旋转机构小齿轮驱动电机 7, 小齿轮带动大齿轮旋转, 当大齿轮顺时针旋转 180° 后, 关闭电机 7 .前臂的电机 5 打开, 前臂的升降螺杆逆时针旋转, 升降箱和除冰机构下降, 当夹紧夹 5 将输电线夹紧时, 关闭电机 5, 此时前臂便跃过防震锤. 如图 14 所示.
第 4 步:后臂如同前臂过防震锤一样跨越, 机器人便恢复到跨越防震锤前的情况 .如图 15 所示.
3 结 论
以上所述为高压输电线路除冰机器人机械部分的设计, 该机器人为在高压线上自动智能化的作业提供了一个良好的平台, 同时该机器人在未结冰季节可以将前面的除冰装置卸掉而换为巡线装置, 这样就变成了巡线机器人, 达到一机多用的目的 .该机器人采用两手臂轮式行走结构, 使结构上更为简便, 控制上更容易实现, 巧妙的线夹装置和仿尺蠖越障行走的方式使得该机器人的的可靠性更高.通过仿真实验表明, 该机器人可以在线路上稳定的除冰, 同时完全解决了直线段的自主越障问题, 变路径自主越障还需要人工辅助, 基本上能够较好地完成规定的除冰任务.——论文作者: 张 屹 邵 威 高虹亮 罗 成 杨 旸
参考文献 :
[ 1] 张运楚, 梁自泽, 谭 民.架空电力线路巡线机器人的研究综述[ J] .机器人, 2004, 26( 5) :467-473 .
[ 2] 吴俊飞, 王新智, 姜生元, 等.高压线检测机器人吊臂式越障机构的研制[ J] .机器人技术, 2006( 11) :35-36.
[ 3] 朱兴龙, 王洪光, 房立金, 等.一种自主越障巡检机器人行走夹持机构[ J] .机械设计, 2006, 23( 8) :11-13 .
[ 4] 苑吉河, 蒋兴良, 易 辉, 等.输电线路导线覆冰的国内外研究现状[ J] .高电压技术, 2004, 30( 1) :6-9.
[ 5] 耿 欣, 周延泽.巡线机器人的爬行方案设计[ J] .机器人技术与应用, 2002( 4) :19-21.
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

