0
发表咨询在线!

发布时间:2022-03-02所属分类:电工职称论文浏览:1857次
摘 要: 摘要 为了拓宽交流传动系统的恒功率调速运行范围,在研究多相系统变换理论和多相电机矢量控制的基础上,提出了一种基于转子磁场定向矢量控制的多相感应电机电子变极调速方法。该方法不需要额外增加电机的容量或电流,通过转子磁场定向矢量控制产生不同平面的谐波电流,

摘要 为了拓宽交流传动系统的恒功率调速运行范围,在研究多相系统变换理论和多相电机矢量控制的基础上,提出了一种基于转子磁场定向矢量控制的多相感应电机电子变极调速方法。该方法不需要额外增加电机的容量或电流,通过转子磁场定向矢量控制产生不同平面的谐波电流,驱动电机旋转,从而控制电机实现了在不停电情况下的电子变极,而且变极过程平滑,无大的转矩波动。本文以九相感应电机为例,对提出的方法进行实验验证,给出了其在转子磁场定向矢量控制下的 3 对极和 9 对极之间相互电子变极的实验结果。实验结果表明,所提出的方法能够在不停电的情况下实现电子变极调速,有效地提高了电机恒功率调速运行范围。
关键词:电子变极 转子磁场定向矢量控制 恒功率调速范围 多相感应电机
1 引言
在许多应用场合,如机床用伺服系统、舰船推进系统、航空器驱动、飞轮储能系统等,要求传动系统既能在低速时提供大的转矩,又具有宽广的恒功率调速运行范围,然而目前由传统三相感应电机构成的交流传动系统调速范围有限。常用的解决方法是简单地采用更大功率电机和大容量变频器,但是这样电机体积和功率器件的容量都要增大,在经济和能源上造成很大的浪费[1-3]。
为解决上面所述缺陷,大量学者研究了电机定子绕组结构,通过改变定子绕组线圈的连接方式让电机工作在不同的极对数模式下。文献[4]通过在低速时采用大的极对数,在高速时采用小的极对数,来满足低速大转矩和宽广的恒功率运行范围的要求,这种方法的缺点是需要停电切换,切换过程不输出转矩,且切换过程是不连续、不平滑的,有冲击电流和冲击转矩。文献[5]通过具有两套 Y 形联结的三相感应电机实现了 1 对极和 2 对极之间的变极,但在变极的暂态过程中会产生径向力,严重影响轴承的寿命。文献[6-9]实现了多相电机多相电流或者不同极对数的电流控制,但是没有实现电子变极。文献[10]利用多相电机多个控制自由度的特性,在一台九相感应电机中,通过多相电机转差频率控制产生不同平面的谐波电流,使电机在不同极对数的旋转磁场下旋转,实现了在不停电情况下的电子变极,但是其动态性能不佳。
相关知识推荐:论文发表国际期刊快吗
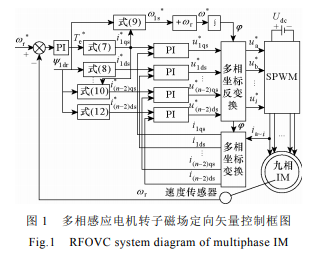
本文基于多对极多相系统变换理论,利用多相电机具有多个控制自由度的特点,提出基于转子磁场定向矢量控制的多相感应电机电子变极方法,实现了在不停电的情况下连续平滑的电子变极,拓宽了电机恒功率调速运行范围。
2 电子变极技术的实现
2.1 电子变极基本理论
n 相对称系统在固定坐标 α-β 变换坐标系下的恒功率坐标变换矩阵 C 如式(1)所示,该矩阵实现了对多相系统的解耦[11, 12]。式中,v 为谐波次数;1, 2, 3,…v 分别是各次谐波在任意速坐标系下的相位电角度;α=2π/n。式(1)矩阵的第 1、2 行构成 q1-d1 平面,对应着基波平面;第 3、4 行构成 q2-d2 平面,对应着 2 次谐波平面,依次类推可以得到各次谐波平面。 当 n 为偶数时,电机存在的 q-d 平面个数 m=(n-2)/2;当 n 为奇数时,m=(n-1)/2,在这时坐标变换矩阵 C 应删去最后一行。此外需要说明的是,若绕组结构为 2/n 相带分布,则有偶次谐波平面;若绕组结构为/n 相带分布,则没有偶次谐波平面,应在该矩阵中去掉各偶次谐波平面对应的两行。根据式(1)的坐标变换矩阵可知,在多相情况下多相电机的相电流变换后将形成 m 组 α-β 分量,称为 m 个控制自由度或者 m 个控制平面。电子变极的原理就是利用多相电机具有多控制自由度的特点,通过控制相电流的相位生成不同极对数的旋转磁场,达到三相电机所不能实现的不停电下的电子变极。具体的电子变极原理可参考作者的其他文章[10]。
感矩阵;下标 s、r 分别表示定、转子;sr 表示互感。根据式(1)在 α-β 变换坐标系下将定子电压和电流变换为直流分量,使电机在各个 q-d 平面不存在耦合,以便进行控制。
3 实验结果及其分析
为了对提出的基于转子磁场定向矢量控制的多相感应电机电子变极技术进行验证,本文以九相感应电机为实验对象,验证了 1、3 次谐波平面间变极切换。本文实验所用九相感应电机参数:额定功率 10kW,额定转速 1 000r/min,相电压 232V,相电流 6.3A,极对数 3。由电压源逆变器供电,直流母线电压 700V,逆变器开关频率 8kHz。实验电机如图 2 所示。
设计了一套以 32 位浮点 DSP TMS320F28335 和 FPGA 芯片 cyclone EP1C6240C6 为控制核心的实验装置,实验装置的基本框图如图 3 所示。
图 4 为九相电机在转子磁场定向矢量控制下,给定转速 100r/min(5Hz) 时参考电压波形、实际的电压波形和定子电流波形(从上到下)。由图 4 中可知,在转子磁场定向矢量控制下,定子谐波电流得到了有效地抑制,转子磁场定向矢量控制的效果还不错。
图 5 为电机给定转速在 100r/min 时 9 对极向 3 对极进行电子变极的实验波形。可见在 9 对极向 3 对极变极过程中,当 i3ds 和 i3qs 逐渐减小为 0 的同时, i1ds 和 i1qs 逐渐增大,最后到达稳定,电机最终在 3 对极模式下运行。
图 6 为电机在给定转速在 100r/min 时,3 对极向 9 对极进行电子变极的实验波形。可见在 3 对极向 9 对极变极过程中,当 i1ds 和 i1qs 逐渐减小为 0 的同时,i3ds 和 i3qs 逐渐增大,最终稳定运行在 9 对极模式下。
图 7 为电机在加速过程进行电子变极的电流和速度波形,从 9 对极下的 30r/min 加速到 3 对极下的额定转速 1 000r/min,在 333r/min 的时刻从 9 对极切换到 3 对极,从图中可见,所提出的方法在加速的动态过程中也实现了很好的变极,过渡过程比较理想。
图 8 为电机在减速过程进行电子变极的电流和速度波形,从 3 对极下的额定转速 1 000r/min 减速到 9 对极下的 30r/min,在 333r/min 的时刻从 3 对极切换到 9 对极,从图中可见,所提出的方法在减速的动态过程中也实现了很好的变极,过渡过程比较理想。由实验结果可知,本文提出的基于转子磁场定向矢量控制的多相感应电机电子变极方法,能够实现九相电机在 3 对极和 9 对极之间相互进行电子变极,扩大电机的恒功率调速运行范围。
4 结论
基于转子磁场定向矢量控制的多相感应电机电子变极方法是多相电机交流传动系统的一个重要组成部分,多相电机在不同极对数之间的电子变极研究表明该方法能扩大电机的恒功率运行范围,高速时采用较小的极对数,可以实现高转速,同时相同的速度相对变频调速系统具有较低的电流频率,从而减小开关频率和铁耗。最后通过实验验证了所提的方法,在电子变极过程中,电流和转矩过渡平稳。——论文作者:杨家强 高 健 金玉龙 胡浩峰
参考文献
[1] Swamy M M, Kume T J, Maemura A, et al. Extended high-speed operation via electronic winding change method for AC motor[J]. IEEE Trans. on Industry Applications, 2006, 42(3): 742-752.
[2] Levi E, Jones M, Vokosavic S N, et al. A novel concept of a multiphase, multimotor vector controlled drive system supplied from a single voltage source inverter[J]. IEEE Transactions on Power Electronics, 2004, 19(2): 320-335.
[3] Kume T, Swamy M, Sawamura M, et al. A quick transition electronic winding changeover technique for extended speed ranges[C]. Proceedings of IEEE Power Electronics Specialist, Aachen, Germany, 2004: 3384-3389.
[4] 钱罗奋. 一种新的交流电机换相变极法-2/3 变极[J]. 中国电机工程学报, 2004, 24(3): 120-125. Qian Luofen. A new commutating method for change pole to electric machine 2/3 change-pole[J]. Proceedings of the CSEE, 2004, 24(3): 120-125.
[5] Osama M, Lipo T A. A new inverter control scheme for induction motor drives requiring wide speed range[J]. IEEE Transactions on Industry Applications, 1996, 32(4): 938-944.
[6] Hartman M T. The application of fortescue’s transformation to describe power states in multi-phase circuits with non-sinusoidal voltage and currents[C]. Proceedings of Electrical Power Quality and Utilisation, Barcelona, Spain, 2007: 1-5.
[7] Kelly J W, Strangas E G. Torque control during pole-changing transition of a 3: 1 pole induction machine[C]. Proceedings of Electrical Machines and Systems, Seoul, Korea, 2007: 1723-1728.
[8] Lyra R O C, Lipo T A. Torque density improvement in a six-phase induction motor with third harmonic current injection[J]. IEEE Transactions on Industry Applications, 2002, 38(5): 1351-1360.
[9] Fuchs E F, Myat M H. Speed and torque range increases of electric drives through compensation of flux weakening[C]. Proceedings of Power Electronics Electrical Drives Automation and Motion, 2010: 1569-1574.
[10] 杨家强, 黄进, 康敏. 多相感应电机的电子变极技术[J]. 电机与控制学报, 2009, 13(3): 322-326. Yang Jiaqiang, Huang Jin, Kang Min. Electronic pole change technique of multi-phase induction motor[J]. Electric Machines and Control, 2009, 13(3): 322-326.
[11] Huang Jin, Kang Min, Yang Jiaqiang, et al. Multiphase machine theory and its applitions[C]. Proceedings of Electrical Machines and Systems, 2008: 1-7.
[12] 黄进, 康敏, 杨家强. 新型单绕组多相无轴承电机 [J]. 浙江大学学报(工学版), 2007, 41(11): 1850-1856. Huang Jin, Kang Min, Yang Jiaqiang. Analysis of a new 5-phase bearingless induction motor[J]. Journal of Zhejiang University (Engineering Science), 2007, 41(11): 1850-1856.
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

