0
发表咨询在线!

发布时间:2022-04-11所属分类:工程师职称论文浏览:1823次
摘 要: 摘要:齿轮系统应用广泛,并在风力发电、航空航天、汽车和盾构机等机械设备中发挥关键作用。其动力学特性的优劣将直接影响设备整机的工作性能。然而齿轮传动的结构形式多样、内外部激励和非线性因素丰富,同时工作环境复杂多变,这使其动力学分析相比较于其他机械系统

摘要:齿轮系统应用广泛,并在风力发电、航空航天、汽车和盾构机等机械设备中发挥关键作用。其动力学特性的优劣将直接影响设备整机的工作性能。然而齿轮传动的结构形式多样、内外部激励和非线性因素丰富,同时工作环境复杂多变,这使其动力学分析相比较于其他机械系统更加复杂。另外,制造、加工、装配等的误差、磨损、润滑和运行环境等因素将导致齿轮系统的内外部激励和系统参数具有不确定性。齿轮系统动力学分析需要考虑这些不确定性因素。目前,针对齿轮系统动力学特性的不确定性分析,国内外学者已开展了广泛的研究工作。从不确定性因素的描述方式、动力学方程的求解方法、动力学特性分析、可靠性与优化设计、以及不确定性分析的试验研究等方面系统地评述国内外学者对齿轮传动系统不确定性动力学特性的研究现状,并给出需要进一步研究的问题。
关键词:齿轮传动;动力学;统计分析;随机误差;不确定性
0 前言
齿轮传动系统具有结构紧凑、功率范围广和传动速比宽等优点,已被广泛应用于多种机械装备中。随着机械装备向大型化、高可靠、高精度和长寿命等方面的发展,人们对齿轮传动系统动力学性能的要求也在不断提高,更准确地预测系统动态性能变得越来越重要。然而,周期时变啮合刚度、齿侧间 隙、传递误差和复杂的外部激励增加了齿轮系统动力学问题的研究难度。目前,已有不少针对齿轮系统动力学建模[1-4]与求解[5-8]、固有特性[9-10]、动态响应[11-14]、稳定性[15-18]、可靠性分析和优化设计[19-22] 等方面的研究工作。李润方等[23]系统地阐述了齿轮传动系统的振动、冲击和噪声分析中的关键理论及方法。
上述研究大多将齿轮系统动力学问题处理为确定性参数或激励下的问题。实际工程中,由于制造、加工、装配等的误差、磨损、润滑和运行环境变化等原因,不确定性因素广泛存在于齿轮传动系统中。然而,在以往的设备研发设计过程中,由于设计过程的简化或技术条件限制,往往对这些不确定因素加以忽略,或通过安全系数法简单估计不确定性因素。但这常常会引起设备的可靠性问题。例如,根据华能、大唐和华电等 12 家风电企业的风电机组故障统计分析,2011 年 1 月至 8 月,服役的 23 600 台风电机组发生故障的次数超过 40 000 次[24]。 Vestas和GE公司所产的1.5 MW双馈式风电机组也曾因齿轮箱质量问题而被大规模召回。为满足现代机械设备日益提高的性能和可靠性要求,必须在系统建模和分析中考虑不确定性因素。齿轮系统动态特性不确定性分析的早期工作,可追溯到 1977 年 TOBE 等[25-26]的研究。他们通过试验证明了齿轮系统传递误差中随机成分的存在,并建立了系统的统计动力学方程,运用统计线性化方法和矩方程求解得到响应的前两阶矩。随后,KUMAR 等[27]给出了直齿轮传动系统的等效离散时间状态方程,并分析了随机误差幅值和转速对动载系数的影响情况。 NERIYA 等[28]分析了单级斜齿轮传动系统在随机误差激励下的动态响应。
不确定性方法处理齿轮传动系统的动力学问题一般包括两个方面:其一,不确定性因素的描述方式;其二,分析模型对不确定性的传播。统计模型、区间模型和模糊模型是不确定因素描述的三种主要方式。若不确定性因素具有随机性,则可以通过统计模型进行描述,其概率分布一般通过大量样本或具有代表性的样本进行估计[29]。另外,不确定性输入参数的变化范围往往容易获得,因此可以采用区间模型[30]处理这一类问题。模糊模型则是基于模糊集合理论和模糊逻辑学的数学模型,用以描述由“含糊不清”引起的不确定性因素。分析模型对不确定性的传播则主要研究如何通过输入参数的不确定性特征获得系统输出的不确定性特征。1995 年,李润方等[31]对六七十年代国外齿轮系统的动态特性统计分析进行了阐述,其主要内容是有关随机传递误差下的系统动载荷和动态响应分析。近些年,国内外研究人员在这两方面又开展了一些卓有成效的研究工作。本文将从不确定因素的描述方式、动力学方程的求解方法、动力学特性不确定性分析、可靠性分析与优化设计、以及不确定性分析的试验研究等方面对国内外研究进展进行评述,并给出需要进一步研究的方向。
1 不确定性因素的描述方式
不确定性因素的描述方式是不确定性问题研究的首要问题。只有根据已知信息的数量和类型选择恰当的描述方式,才能选择对应的不确定性分析方法进行相关的动力学分析。根据研究现状,齿轮系统的不确定性因素主要包括内部激励、外部激励和系统参数的不确定性。内部激励是齿轮系统与其他机械系统的主要不同之处,外部激励则根据不同的应用对象会有不同的特点。本节主要阐述了内部激励、外部激励和系统参数等不确定性因素的描述方式。
1.1 内部激励不确定性的描述
齿轮系统的内部激励主要包括误差激励、刚度激励和啮合冲击激励。目前,不确定性分析中主要讨论了误差激励和刚度激励的不确定性。误差激励的不确定性主要通过统计模型和模糊模型描述,刚度激励的不确定性主要通过统计模型描述。
1.1.1 误差激励不确定性的描述
在统计模型中,误差激励一般被表示为确定性分量与随机性分量之和的形式。其中随机部分有多种描述方式,如 Gaussian 白噪声、Gaussian 有色噪声和服从某种分布规律的随机变量。 Gaussian 白噪声形式的随机误差激励可以通过整形滤波器得到,也可直接通过 MATLAB 软件提供的内部函数直接产生。白噪声是指其功率谱密度函数在整个频域内均匀分布的随机信号。Gaussian 白噪声则还需要满足其幅度统计规律服从 Gaussian 分布[32]。由于二阶 Markov 过程可以提供很好的随机振荡现象,常被用做整形滤波器,以产生 Gaussian 白噪声[27]。
早在 1977 年,TOBE 等[25]便利用该模型分析了齿轮副中误差激励的随机成分对动载荷的影响。SATO 等[33]研究了随机误差激励下齿轮系统的间隙非线性特征。KUMAR 等[27]分析了随机误差激励下单级齿轮副系统的动态响应统计特征。 NERIYA 等[28]建立了斜齿轮系统的扭转、弯曲、回转和轴向运动的耦合型分析模型,并分析了系统动态响应的统计特征。GELMAN 等[34]则同时考虑随机传递误差、随机啮合刚度和随机初始条件,研究了齿轮系统动态平均激励和传递平均载荷的关系。另外,Gaussian 白噪声还可通过 Matlab 软件提供的内部函数 WGN、AWGN 或者 RANDN 的直接产生。运用这种方式,FENG 等[35]分析了含随机误差和随机间隙的单级齿轮系统稳定性。陈会涛等[36]分析了随机误差激励对含时变啮合刚度和齿侧间隙的单级齿轮系统非线性动态响应的影响。 Gaussian 有色噪声主要是指幅度分布服从 Gaussian 分布,其功率谱密度函数在整个频域内不是均匀分布的随机信号。
除了Gaussian白噪声和 Gaussian有色噪声两种随机过程的方式外,随机误差激励还可以通过服从某种分布规律的随机变量描述,例如,正态分布,瑞利分布等。正态分布是一个在数学、物理和工程等领域都非常重要的分布函数。在实践中,如果影响随机变量的因素很多,而每一种因素的影响都很小,则可以近似认为该随机变量服从正态分布规律[32]。DRIOT 等[41]将与轴不对中误差、齿轮轮齿齿廓误差和导程误差有关的不确定性处理为服从正态分布规律的随机变量,并运用改进的 Taguchi’s 方法分析了误差随机性对齿轮副系统动力学行为的影响。随机部分的均值为制造误差的标称值,标准偏差由公差范围和质量等级确定。BONORI 等[42] 通过 K 齿廓图(K-chart)得到了服从正态分布规律的随机制造误差,并对比分析了有无制造误差时单自由度齿轮副系统的幅频特性,其中 K 齿廓图提供了单个齿廓相对于沿轮齿齿廓坐标的公差信息。邓绪山等[43]将影响齿轮系统的基节误差和齿形误差考虑为随机变量,并分析了基于随机误差的系统幅频响应。其中,基节误差和齿形误差的均值通过齿轮精度等级确定;基节误差服从正态分布,方差通过 3σ 准则确定;齿形误差服从瑞利分布,方差通过考虑重合度后的等效计算公式得到。
若认为误差激励的不确定性是一种模糊性,则可以通过模糊模型描述。模糊模型主要处理由“含糊不清”引起的不确定性因素,这里的“含糊不清” 主要是指存在于现实中的不分明现象。模糊不确定性因素一般表示为模糊数[44],主要通过隶属度函数描述。传统集合论中某个参数是否属于该集合是有明确定义的,隶属度取为 0 和 1,对应“假”和“真”。而在模糊理论中,隶属度是一个在 0 和 1 之间变化的连续量。考虑对误差大小和取值范围认识的模糊性,李瑰贤等[45]将误差激励假设为服从模糊正态分布规律的模糊变量,其隶属函数可表示为 ( ) ( ) ( ( ) ) 2 exp Ae t ne e r rj = −− (3) 式中,ej 是模糊集合 er(t)的界定标准;常数 n 和 ej 根据实际齿轮传动系统的工作环境和精度选取。建立了单级斜齿轮系统的扭转振动模糊微分方程,并给出了相应隶属度下模糊动态响应的求解表达式[45-46]。
1.1.2 刚度激励不确定性的描述
相比于误差激励不确定性的描述研究,有关刚度激励不确定性描述的研究工作较少。目前,刚度激励的不确定性主要通过统计模型描述,具体为服从正态分布规律的随机变量。王靖岳等[47]通过服从正态分布规律的随机变量描述啮合刚度的不确定性,运用四阶 Runge-Kutta 数值积分法分析了三自由直齿轮副系统存在啮合刚度波动项随机扰动时的系统稳定性问题。廖映华等[48]则在啮合刚度的确定性表达式后增加了随机分量,通过服从截尾正态分布规律的随机变量描述其随机不确定性,并运用 Runge-Kutta 数值积分法分析了某特种装备两级人字齿轮系统的动态响应特性。
1.2 外部激励不确定性的描述
除了齿轮轮齿啮合产生的内部激励外,原动机和负载等其他部件基本特性的不同也会对轮齿啮合产生动态激励,这些激励统称为齿轮系统的外部激励[23]。考虑皮带摩擦、电动机转动的不平稳性和波动性,齿轮系统的外部激励也存在不确定性。外部激励的不确定性一般通过统计模型描述,具体形式为 Gaussian 白噪声。PFEIFFER 等[49]研究了随机白噪声激励下的齿轮系统拍击现象。NAESS 等[50]和 MO 等[51]分别运用路径积分法分析了含间隙非线性和偏心误差的单级齿轮系统强迫响应统计特征和稳定性。YANG 等运用统计 Newmark 算法分析了多级齿轮链[52]和行星齿轮传动链[53]在确定性和随机外载荷下的振动特性,其中,载荷的随机分量通过白噪声序列和白噪声强度描述。WEN 等[54]则研究了含时变啮合刚度和齿侧间隙的单自由度齿轮副系统在谐波和白噪声激励下的动态响应特性。
相关知识推荐;机械动力学领域sci期刊有哪些
风电机组齿轮箱是齿轮传动系统的重要应用之一。由于风速的易变性和不可控性,风速状况对风机系统的运行性能有重要影响。近年来人们开始研究风机齿轮箱在随机风载荷下的动态特性。风速模型主要通过统计模型进行描述,具体为 Weibull 分布模型、组合风速模型和基于谱估计的风速模型等三种描述形式。
组合风速模型是另一种常用的风速模型,主要由平均风速、阵风、渐变风和湍流等成分组成[59]。其中,平均风速成分一直存在,主要由风电场测风所得的 Weibull 分布参数近似确定,一般取为常数;阵风主要用来考核在较大风速变化情况下的系统波动特性,一般具有余弦特性;渐变风一般通过线性函数的形式描述;湍流主要用于描述指定相对高度上风速变化的随机特性。王雷等[60]运用组合风速模型给出了风力机输出特性模拟系统的设计方案。组合风速模型在低频区的功率谱密度较高,高频区也存在一定的功率谱密度分布。其主要优点在于物理概念清晰、应用灵活、可以根据需要对不同风速分量进行组合。
基于谱估计的风速模型是以随机风速的谱特征为依据,应用随机信号的谱估计或预测方法建立的风速模拟模型。常用的功率谱密度函数有 Von Karman 速度谱、Kaimal 速度谱等。杨军等[61]利用 Kaimal 谱描述脉动风速特性,进而得到风机传动系统的随机风载荷,并分析了齿轮传动系统在随机风速下的载荷特性。通过修改 Kaimal 滤波器的参数,该风速模型可考虑不同平均风速和湍流强度。基于谱估计的风速模型可以较准确地体现自然风速的功率谱分布,用于模拟短期自然风特征非常有效。自回归滑动平均方法 (Auto-regressive and moving-average, ARMA)属于谱估计方法的一种。它相当于一组数字滤波器,将白噪声变为近似具有目标功率谱密度或相关函数的离散随机过程或随机场。在模拟随机风速时,它实质是用 ARMA 模型逼近 von Karman 谱密度函数。李东东等[62]利用 ARMA 方法建立了具有一定功率谱密度特征的随机风速模型,并验证了该模型所生成的风速序列。秦大同等[63]运用 ARMA 风速模型分析了风机行星传动系统的纯扭转振动特性。秦大同等[64]同时考虑随机风载荷和发电机电磁转矩,研究了在该激励下行星齿轮系统的自由振动特性和强迫振动特性。
汽车变速箱也是齿轮系统的应用领域之一。其主要承受的外部激励有电动机转矩激励和路面谱激励。电动机转矩激励是引起变速箱扭转振动的主要激励。然而由于驱动电动机电流换向、电枢反应和加工工艺等因素,电动机转矩将产生随机波动。汽车行驶在不平路面时,将承受随机路面谱激励。这两种随机激励一般通过实际测量或软件仿真实现。周云山等[65]通过实际测量得到随机波动的电动机转矩,运用 Road Builder 法创建光滑沥青路面进而得到随机路面谱。他们运用模态叠加法分析了这两种随机外激励下的变速箱箱体动态响应特性。 OGNJANOVIC 等[66]实际测量多组随机路面谱数据,并运用基于可靠性的方法测试了汽车齿轮箱在不同随机路面谱激励下的路面承载能力。李东兵等 [67]也研究了汽车齿轮系统的外部随机激励。
1.3 系统参数不确定性的描述
除了激励源具有不确定性外,由于制造、加工与装配误差、润滑和使用磨损等原因,齿轮系统的物理参数和几何参数等也会表现出不确定性。在考虑含不确定性系统参数的齿轮系统动力学问题中,系统参数的不确定性一般通过统计模型和区间模型描述,其中,统计模型为主要的描述方式。
统计模型通过服从正态分布规律的随机变量描述系统参数的不确定性。关注的不确定性参数主要有质量参数、齿侧间隙和阻尼比等。假设随机间隙为服从正态分布的随机变量,陈思雨等[13]对比分析了含固定间隙、时变间隙和随机间隙的齿轮副系统时域和频域响应特性。刘梦军等[68]分析了考虑随机齿侧间隙和时变啮合刚度的齿轮副系统全局初值特性。LU 等[69]利用分岔图、相平面图和最大 Lyapunov 指数等方式对考虑随机间隙的齿轮副系统动力学稳定性进行了分析。GUERINE 等[70]分别分析了质量、阻尼系数、弯曲刚度、扭转刚度的随机不确定性对单级齿轮系统动态响应的影响规律,并分析了这些随机参数的综合影响。GUERINE 等[71] 假设摩擦因数为服从平均分布规律的随机变量,分析了随机摩擦因数对单级齿轮系统动态响应的影响规律。针对系统各构件质量参数,王世宇等[72]通过假设这些参数均服从正态分布规律,分析了模态跃迁对行星齿轮传动系统模态统计特性的影响情况。 PERRET-LIAUDET 等[73]假设黏性阻尼比、固有频率和刚度激励幅值均为统计独立的 Gaussian 随机变量,利用改进的 Taguchi 方法分析了含参数不确定性的齿轮副系统在主共振区域的幅频特性。魏永祥等[74]在齿轮-转子四自由度纯扭转模型的基础上,考虑系统几何参数、材料参数及外部载荷均具有随机性,讨论了含随机系统参数的齿轮-转子系统在随机激励下的动态响应特性。LU 等[75]分析了激励频率、阻尼比和间隙等系统参数具有随机摄动时的齿轮传动系统的非线性统计动力学特性。王靖岳等[76]分析了激励频率、阻尼比、齿侧间隙和啮合刚度的随机扰动对单级三自由度齿轮系统分岔特性的影响。
虽然统计模型在理论研究与工程应用上十分普遍,但该模型是基于大量样本信息的。在不确定性因素的统计信息很难得到或者无法获取时,统计模型将很难被应用。相比而言,区间模型主要通过区间数描述不确定性参数,所需的不确定性信息容易获取。区间模型最早用于处理计算机运算时由截断和舍入误差造成的数值计算误差问题[77]。近些年,其在数值计算理论[78-79]和工程应用[80-81]等方面已得到广泛应用。在齿轮系统动力学特性的不确定性分析中,区间模型属于一种相对较新的不确定性描述方式。目前,相关的应用较少。DONG 等[82] 通过区间数描述切向力、工况系数、动载系数、沿轮齿方向的载荷分布、材料特性和轮齿形状因子等参数的不确定性,以疲劳强度灵敏度最小化为设计目标优化风机齿轮传动的系统参数。段文峰[83]通过区间数描述载荷、裂纹长度和断裂韧度等影响齿轮断裂的不确定性因素,结合响应面法和 Taylor 级数展开提出了一种齿轮断裂可靠性分析的非概率方法。
2 动力学方程的求解方法
动力学建模是齿轮系统动力学方程求解的基础。根据建模时考虑的因素和使用的方法,齿轮系统的动力学模型有集中质量模型、分布质量模型和刚柔耦合模型等。根据研究现状,人们主要针对集中参数模型展开相关的不确定性分析。
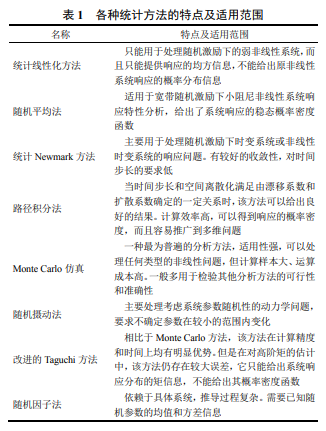
由集中参数方法得到的动力学方程为二阶运动微分方程组。当系统参数和激励是确定性函数时,可通过经典的数学分析方法进行求解。例如,数值方法[23]或近似解析法[84]。然而,实际系统往往存在很多不确定性因素,例如加工、制造等的误差、系统运行环境的不确定变化。显然,这些问题通过经典的数学分析方法和微分方程并不能给出正确描述[85]。针对上述不确定性问题,统计模型、区间模型和模糊模型三种不确定性因素描述方式对应统计方法、区间方法和模糊方法三类分析方法,其中,统计方法是动力学方程求解的主要方法,包括统计线性化法、随机平均法、统计 Newmark 法、路径积分法、Monte Carlo 仿真、随机摄动法、改进的 Taguchi 方法和随机因子法。
统计线性化法[86]的基本出发点是寻找一个等效的线性系统,使之与原来的非线性系统之间的均方“残差”最小。该方法的精度主要取决于非线性系统的真解偏离 Gaussian 分布的程度。TOBE 等[25] 针对一对齿轮副模型,建立了考虑随机传递误差,梯形变刚度和齿轮间隙的非线性随机动力学方程,在已知初始分布和转移概率密度的情况下,运用统计线性化方法求解了系统的统计微分方程。YANG 等[52]运用统计线性化技术和统计 Newmark 算法求解了确定性和随机载荷下含时变啮合刚度和齿侧间隙的多级齿轮系统运动微分方程。
随机平均法是将随机平均原理和 FPK 方程法相结合的一类近似方法,主要分为标准随机平均法、 FPK 方程系数平均法和能量包线随机平均法三种[87-88]。由随机平均原理[89]可知,在一定条件下,线性或非线性系统对非白噪声激励的响应可以近似为二阶 Markov 扩散过程。该近似扩散过程的 FPK 方程的漂移系数和扩散系数可以由给定动态系统的运动方程经过适当的随机平均或随机平均连同对时间的平均获得,求解平均后的 FPK 方程就可以得到原系统响应的近似解。实质上,随机平均法是通过随机平均或者连同对时间的确定性平均得到一个与原系统等效的受白噪声激励的近似系统[90]。针对含间隙和随机误差激励的单级齿轮系统,SATO 等[33] 运用随机平均法得到了该系统的振动统计特征,并讨论了在随机激励下非线性跳跃现象的发生条件。随后 SATO 等[91]运用随机平均法给出了随机外激励下齿轮系统动力学方程的近似解。——论文作者:魏 莎 韩勤锴 褚福磊
婢圭増妲�:閳剁姵鏋冮悮顔芥降閼奉亞鐓$純鎴欌偓浣烘樊閺咁喓鈧椒绔鹃弬鍦搼濡偓缁便垺鏆熼幑顔肩氨閿涘矁顕╅弰搴㈡拱閺傚洨灏炲鑼病閸欐垼銆冪憴浣稿灁閿涘本浼冮崰婊€缍旈懓锟�.閳垛€愁洤閺嬫粍鍋嶉弰顖欑稊閼板懍绗栨稉宥嗗厒閺堫剙閽╅崣鏉跨潔缁€鐑樻瀮閻氼喕淇婇幁锟�,閸欘垵浠堢化锟�鐎涳附婀虫い楣冩6娴滃牅浜掗崚鐘绘珟.

SCISSCIAHCI

